123 (PDF)
File information
Title: Microsoft Word - WM-cw22.doc
Author: Andy
This PDF 1.3 document has been generated by PScript5.dll Version 5.2 / GPL Ghostscript 8.15, and has been sent on pdf-archive.com on 10/05/2011 at 18:07, from IP address 84.10.x.x.
The current document download page has been viewed 1579 times.
File size: 347.34 KB (15 pages).
Privacy: public file




File preview
Politechnika Lubelska
MECHANIKA
Laboratorium wytrzymałości
materiałów …
Ćwiczenie 22 - Wyznaczanie momentu
bezwładności przekroju zginanej belki
z definicji i wzoru Geigera
Przygotował: Andrzej Teter
(do użytku wewnętrznego)
Wyznaczanie momentu
bezwładności przekroju zginanej
belki z definicji i wzoru Geigera
Metoda Geigera
Do wyznaczenia sztywności układu mechanicznego możemy zastosować znany
z mechaniki wzór Geigera. Dla najprostszego mechanicznego układu drgającego
o 1 stopniu swobody zbudowanego ze sprężyny o sztywności k i masy skupionej
m (rys. 1) równanie ruchu postępowego ma postać:
m⋅
d2y
+ ky = 0
dt 2
(1)
Rys. 1
lub
d2y
+ ω2 y = 0
2
dt
gdzie
ω=
k
m
(2)
gdzie: y – ugięcie, t – czas, ω - częstość kołowa drgań własnych. W położeniu
równowagi (rys. 2) siła ciężkości jest równoważona przez siłę sprężystości. Możemy zapisać warunek:
∑P
iy
= −kyst + mg = 0
(3)
3
© Politechnika Lubelska, Lublin 2008
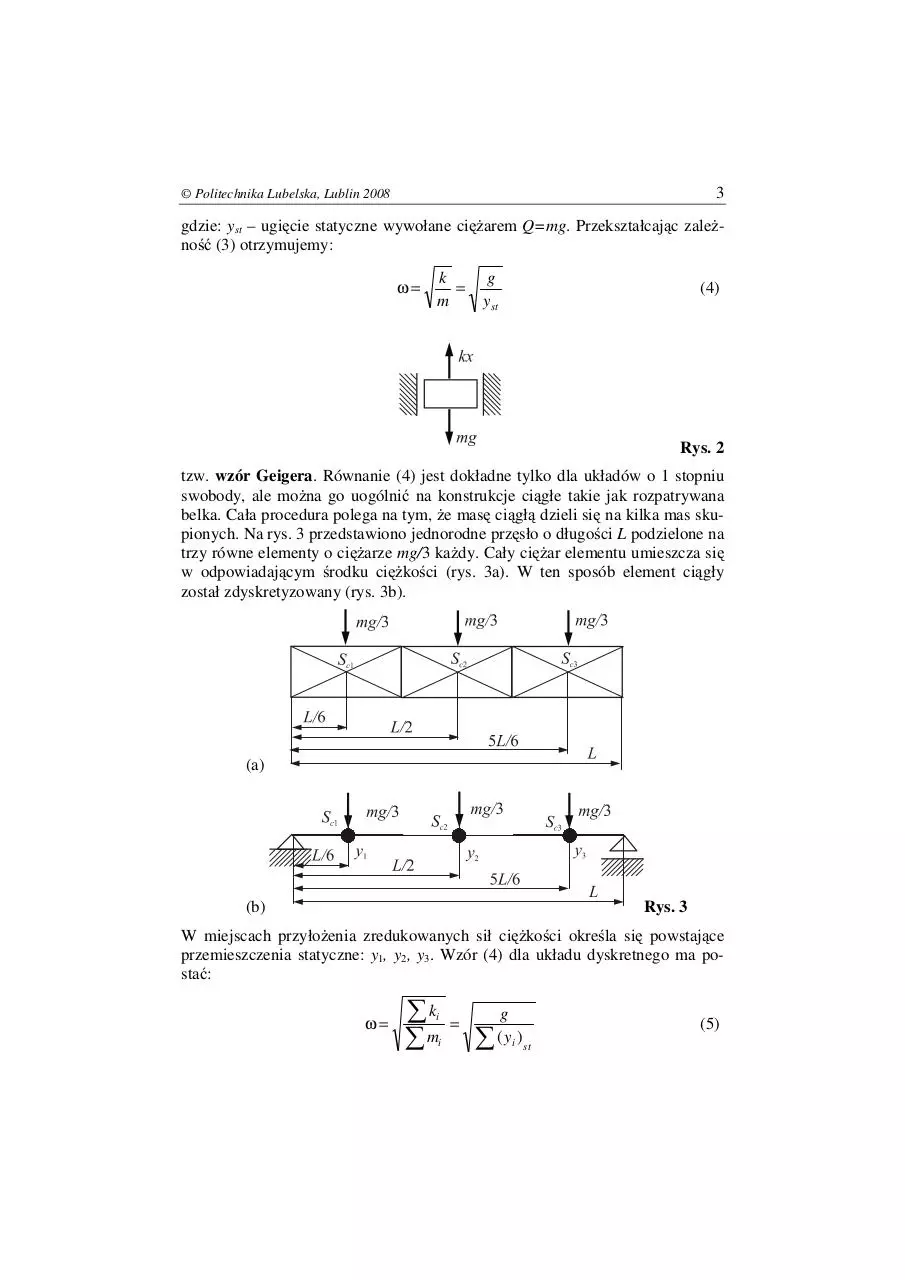
gdzie: yst – ugięcie statyczne wywołane ciężarem Q=mg. Przekształcając zależność (3) otrzymujemy:
ω=
k
=
m
g
yst
(4)
Rys. 2
tzw. wzór Geigera. Równanie (4) jest dokładne tylko dla układów o 1 stopniu
swobody, ale można go uogólnić na konstrukcje ciągłe takie jak rozpatrywana
belka. Cała procedura polega na tym, że masę ciągłą dzieli się na kilka mas skupionych. Na rys. 3 przedstawiono jednorodne przęsło o długości L podzielone na
trzy równe elementy o ciężarze mg/3 każdy. Cały ciężar elementu umieszcza się
w odpowiadającym środku ciężkości (rys. 3a). W ten sposób element ciągły
został zdyskretyzowany (rys. 3b).
(a)
Rys. 3
(b)
W miejscach przyłożenia zredukowanych sił ciężkości określa się powstające
przemieszczenia statyczne: y1, y2, y3. Wzór (4) dla układu dyskretnego ma postać:
ω=
∑k
∑m
i
i
=
∑
g
( yi ) st
(5)
© Politechnika Lubelska, Lublin 2008
4
Ugięcie statyczne yi określamy w ten sposób, że jest to przemieszczenie punktu przyłożenia ciężaru Qi=mig wywołane przez ten ciężar. W skrajnym przypadku możemy cały ciężar podzielić na wiele skończenie małych ciężarów dq:
dq =
mg
⋅ dx = q ⋅ dx
L
(6)
W tym przypadku skupiony mały ciężar dq przyłożony w punkcie x powoduje
ugięcie statyczne:
y st =
dq ⋅ x 2 ( L − x) 2 q ⋅ x 2 ( L − x) 2
=
⋅ dx
3EI z L
3EI z L
(7)
A więc mamy:
∑
( y i ) st =
∫
L
q ⋅ x 2 ( L − x) 2
qL4
⋅ dx =
3EI z L
90 EI z
(8)
zaś:
ω=
∑
g
=
( y i ) st
90 EI z ⋅ g
EI z
= 9,487
4
qL
mL3
(9)
Warto wiedzieć, że ścisłe rozwiązanie dla postaci podstawowej drgań własnych
zginanej belki w teorii drgań ma postać:
ω = π2
EI z
EI z
= 9,8696
3
mL
mL3
(10)
Drugą skrajnością jest przypadek, gdy układ ciągły podzielimy na jeden element
o ciężarze Q=mg przyłożony w punkcie o największym ugięciu. W analizowanym przypadku belki mamy:
ω=
g
ymax
(11)
Ponieważ strzałka ugięcia przęsła obciążonego w środku siłą Q wynosi:
QL3
48EI z
(12)
48 EI z
EI z
= 6,93
3
mL
mL3
(13)
y max =
Otrzymujemy przybliżoną wartość:
ω=
5
© Politechnika Lubelska, Lublin 2008
Błąd oszacowania wynosi:
δω =
6,93 − 9,8696
⋅ 100% = 30%
9,8696
(14)
Wyniki poprawimy dzieląc belkę na n=2, 3, 4, 5… mas lub dostrajając układ
poprzez korekcję masy. Dla przykładu sprawdźmy wyniki dla podziału belki na
dwie części (rys. 4).
Rys. 4
W tym przypadku skupiony ciężar 0,5mg przyłożony w punkcie x=L/4 powoduje ugięcie statyczne, które obliczymy podstawiając dane do równania linii ugięcia (9.9):
( y1 ) st
x = 0 , 25 L
a = 0 , 25 L
P =0 ,5 mg
=
3mgL3
512 EI z
(15)
Analogicznie liczymy dla drugiej części belki:
( y 2 ) st
x = 0 , 75 L
a = 0 , 75 L
P =0 , 5 mg
=
3mgL3
512 EI z
(16)
Podstawiamy (15) oraz (16) do warunku (5) otrzymujemy:
ω=
∑
g
=
( y i ) st
g
=
( y1 ) st + ( y 2 ) st
256 EI z
EI z
= 9,24
3
3m L
mL3
(17)
W tym przypadku błąd oszacowania wynosi:
δω =
9,24 − 9,8696
⋅ 100% = 6,4%
9,8696
(18)
© Politechnika Lubelska, Lublin 2008
6
Kolejne przybliżenie dla podziału belki na trzy części (rys. 3):
( y1 ) st
x= L / 6
a= L / 6
P = mg / 3
( y 2 ) st
( y3 ) st
=
x= L / 2
a= L / 2
P = mg / 3
x =5 L / 6
a =5 L / 6
P = mg / 3
mg L3
50
⋅
⋅
3 EI z 7776
(19)
mg L3 1
⋅
⋅
3 EI z 48
(20)
mg L3
50
⋅
⋅
3 EI z 7776
(21)
=
=
Podstawiamy (19), (20), (21) do warunku (5) otrzymujemy:
∑(y )
= ( y1 ) st + ( y 2 ) st + ( y 3 ) st
∑(y )
=
∑(y )
= 0,01123 ⋅
ω=
g
=
( yi ) st
i st
i st
i st
mg L3
50
mg L3 1 mg L3
50
⋅
⋅
+
⋅
⋅
+
⋅
⋅
3 EI z 7776
3 EI z 48
3 EI z 7776
mgL3
EI
(22)
oraz:
∑
EI z
EI z
= 9,436
3
0,01123 ⋅ m L
mL3
(23)
W tym przypadku błąd oszacowania wynosi:
δω =
9,436 − 9,8696
⋅ 100 % = 4,4%
9,8696
(24)
Przy podziale na 3 części otrzymujemy praktycznie identyczny wynik jak przy
podziale na skończenie wiele mas (9). Dalszy podział praktycznie nie wpływa na
poprawę wyników.
W celu wyznaczenia sztywności układu porównamy częstości kołowe
drgań własnych otrzymane z rozwiązania ścisłego (10) i z wzorem Geigera (5):
π2
EI z
=
m L3
∑
g
( y i ) st
(25)
Przekształcając:
π4 ⋅
EI z
=
m L3
∑
g
( yi ) st
(26)
7
© Politechnika Lubelska, Lublin 2008
EI z =
gm L3
π 4 ( yi ) st
(27)
∑
Dla ustalonej w badaniach doświadczalnych wartości modułu Younga E mamy:
Iz =
gm L3
π 4 E ( yi ) st
(28)
∑
Momenty bezwładności
Wartości momentów bezwładności przekroju poprzecznego możemy obliczyć
wprost z definicji: momentem bezwładności pola figury względem dowolnej
osi nazywa się całkę powierzchniową liczoną z iloczynu kwadratu odległości r
elementu od tej osi i pola elementu dA:
∫
I = r 2 dA
(29)
A
Dla przyjętego układu współrzędnych xy (rys. 5) moment bezwładności pola
figury względem z można wyrazić zależnością:
∫
I z = y 2 dA
(30)
A
Rys. 5
Jeżeli figurę płaską o polu A można podzielić na n figur prostych o odpowiednich polach A1, A2,...,Ai,..,An, (pola „pełne” mają znak plus, zaś „puste” - minus)
obliczenie momentów bezwładności można przeprowadzić całkowaniem kolejno
dla każdego pola:
© Politechnika Lubelska, Lublin 2008
8
n
∫
∑∫
A
i =1 Ai
I z = y 2 dA =
n
y 2 dA =
∑I
(31)
zi
i =1
Moment bezwładności figury złożonej równa się sumie momentów bezwładności figur składowych dla przyjętej osi. Powyższa procedura obliczeniowa bardzo upraszcza i przyspiesza obliczenia momentów bezwładności figur
płaskich pod warunkiem, że można podzielić je na proste części, dla których
znane są momenty bezwładności figur składowych. Uproszczenie polega na tym,
że zamiast liczyć całki liczy się prostą sumę szeregów.
Twierdzenie Steinera
Aby wyznaczyć zależność zachodzącą pomiędzy momentami bezwładności
względem osi równoległych, przyjmuje się do rozważań figurę o polu A oraz
dwa dowolne, ale wzajemnie równoległe układy osi współrzędnych: zy, zcyc (rys.
5). Wprowadzając zależności pomiędzy współrzędnymi:
z = zc+b
(32)
y = yc+a
Podstawiając (32) do (30) otrzymuje się:
∫
∫
∫
∫
A
A
A
A
I z = ( yc + a ) 2 dA = yc2 dA + 2a yc dA + a 2 dA
(33)
Przekształcając:
I z = I zc + 2aS zc + a 2 A
(34)
gdzie: Izc - moment bezwładności pola figury względem osi z1, Szc- moment statyczny względem osi zc. W przypadku, gdy początek układu współrzędnych jest
środkiem ciężkości figury to Szc=0. Momenty statyczne względem osi centralnych są równe zeru. Zależność (23) upraszcza się więc do postaci:
I z = I zc + a 2 A
(35)
Podane wyżej zależności wyrażają twierdzenie Steinera: moment bezwładności
figury płaskiej względem osi odległej od środka ciężkości o a jest równy momentowi bezwładności względem osi równoległej przechodzącej przez środek ciężkości,
zwiększonemu o iloczyn całej powierzchni figury przez kwadrat odległości a (A⋅a2).
Główne momenty bezwładności. Główne osie bezwładności
Można sformułować następujące definicje:
1. Głównymi osiami bezwładności pola figury płaskiej nazywa się takie
dwie osie, względem których osiowe momenty bezwładności osiągają
9
© Politechnika Lubelska, Lublin 2008
ekstremalne wartości, zaś moment dewiacji względem tych osi jest równy zeru.
2. Głównymi momentami bezwładności pola figury płaskiej nazywa się
momenty bezwładności względem głównych osi bezwładności.
3. Jeśli obie główne osie bezwładności figury płaskiej przechodzą przez
środek ciężkości figury, to nazywa się je głównymi centralnymi osiami
bezwładności.
Główny centralny moment bezwładności trapezu
Szczegółowe obliczenia wartości głównego centralnego momentu bezwładności
względem osi zc prześledzimy dla przekroju poprzecznego w kształcie trapezu.
Zarys i dane wymiary przedstawiono na rys. 6.
Rys. 6
Tabela 1
Numer pola
I
Ai
1 a−b
⋅
h
2 2
II
bh
III
SUMA
1 a−b
⋅
h
2 2
h
( a + b)
2
yci
h
3
h
2
h
3
yciAi
a−b
h
12
bh 2
2
a−b
h
12
a −b
bh 2
h+
6
2
Pole powierzchni podzielono na 3 figury: prostokąt – (II), oraz dwa trójkąty - (I),
(III). Ponieważ analizowany trapez posiada pionową oś symetrii, więc współrzędna środka ciężkości cz=0,5a. Drugą współrzędną określono z zależności:
© Politechnika Lubelska, Lublin 2008
10
n
∑y
cy =
ci Ai
i =1
(36)
A
Dla ułatwienia obliczeń zestawiono tabelę 1. Podstawiając do (36) wyznaczone
wielkości, ostatecznie otrzymano:
n
∑y
cy =
ci Ai
i =1
A
a −b
bh 2
h+
2 = h( a + 2b)
= 6
h
3(a + b)
(a + b)
2
(37)
W celu obliczenia momentu bezwładności trapezu względem osi zc należy skorzystać z własności momentów bezwładności. Można je sumować, pod warunkiem, że momenty figur składowych obliczano względem tej samej osi. W tym
celu kolejno dla każdej z wyodrębnionych figur należy zastosować twierdzenie
Steinera, tak aby wyznaczyć składowe momenty bezwładności względem osi zc:
Figura (I) i (III)
Dla obu trójkątów moment bezwładności względem osi centralnej (przechodzącej przez środek ciężkości trójkątów) równoległej do osi zc wynosi:
1 h( a − b) 3
⋅
h
(38)
36
2
zaś odległość między tymi osiami:
h(a + 2b) h
hb
− =
3(a + b) 2 3(a + b)
(39)
Wstawiając te wielkości do twierdzenia Steinera otrzymano:
I zc( I )
=
I zc( III )
(a − b)h 3 (a − b)h hb
=
+
72
2 3(a + b)
2
(40)
Figura (II)
Dla prostokąta moment bezwładności względem osi centralnej równoległej do zc
wynosi: bh3/12 zaś odległość między osiami:
h h(a + 2b) h(a − b)
−
=
2 3(a + b) 6(a + b)
(41)
Wstawiając te wielkości do twierdzenia Steinera otrzymano:
I zc( II ) =
h(a − b)
bh3
+ bh
12
6( a + b )
2
(42)
© Politechnika Lubelska, Lublin 2008
11
Centralny moment bezwładności względem osi Ox dla trapezu wynosi:
I zc = I zc( I ) + I zc( II ) + I zc( III )
(43)
Po podstawieniu wyznaczonych wartości i wykonaniu koniecznych przekształceń ostatecznie otrzymano:
h 3 a 2 + 4ab + b 2
I zc =
(44)
36
a+b
© Politechnika Lubelska, Lublin 2008
12
Politechnika Lubelska, Wydział Mechaniczny
Katedra Mechaniki Stosowanej
Laboratorium Wytrzymałości Materiałów
Imię i nazwisko
Grupa
Data
wykonania
Prowadzący
Ocena
Laboratorium Wytrzymałości Materiałów
Wyznaczanie momentu bezwładności przekroju zginanej belki z definicji
i metodą Geigera
1. Cel ćwiczenia
Celem ćwiczenia jest doświadczalne wyznaczenie momentu bezwładności przekroju belki zginanej metodą Geigera oraz porównanie otrzymanych wyników
z obliczeniami teoretycznymi.
2. Schemat i opis stanowiska
Badania doświadczalne prowadzimy na stanowisku (rys. 1) składającym się
z belki (C) stalowej o stałej sztywności na zginanie EI=const. Belka jest swobodnie podparta na końcach i obciążona w wybranym punkcie odważnikiem
zawieszonym na wieszaku (B). Wieszak oparty na rolce może przemieszczać się
wzdłuż belki. W innym punkcie na statywie magnetycznym zamocowano czujnik przemieszczenia (A).
Rys. 1
3. Przebieg ćwiczenia
1. Szkicujemy zarys przekroju poprzecznego belki i jednoznacznie wymiarujemy go. W tabeli zbieramy konieczne wymiary. Dodatkowo belkę
13
© Politechnika Lubelska, Lublin 2008
2.
3.
4.
5.
6.
ważymy. Pomiary powtarzamy, a w sprawozdaniu zamieszczamy wartości średnie.
Na powierzchni belki zaznaczamy jej środek i oznaczamy go (1).
W punkcie (1) umieszczamy czujnik przemieszczeń i zerujemy go.
Szalkę z dowolnym obciążeniem P umieszczamy możliwie blisko punktu (1) i z czujnika odczytujemy przemieszczenia punktu (1) - y1.
Pomiar zgodnie z zaleceniami prowadzącego powtarzamy, dzieląc belkę
na 2, 3 ,… części. W kolejnych punktach (1), (2), (3)… powtarzamy
czynności 3 i 4.
Otrzymane ugięcia dzielimy przez wartość obciążenia Pi wyznaczamy
jednostkowe ugięcie odpowiadające jednostkowemu obciążeniu.
4. Opracowanie wyników i wykonanie sprawozdania
1) W celu wyznaczenia sztywności układu należy:
a) I przypadek – cała masa belki znajduje się w środku rozpiętości. Wyznaczyć statyczne ugięcie tego punktu wywołane przez ciężar P - y1(P)
i obliczyć ugięcie statyczne wywołane ciężarem belki Q=m·g według
wzoru y1 = mg ⋅ y1 ( P ) / P .
b) Podstawić do wzoru (17) wartość ugięcia y1 :
EI z =
P L3
π 4 y1
Dla ustalonej w badaniach doświadczalnych wartości modułu Young’a
E mamy:
Iz =
P L3
Eπ 4 y1
c) II przypadek - całą masę belki podzielić na 2 równe masy:
m1=m2=m/2.Masa 1 - x1=0,25L, masa 2 - x2=0,75L. W punktach (1) (2)
należy wyznaczyć statyczne ugięcie: yi(P)dla i=1,2. Dodatkowo obliczyć ugięcie statyczne wywołane ciężarem belki Qi=mi·g według wzoru
y i = mi g ⋅ y i ( P ) / P .
d) Podstawić wyznaczone wartości:
Iz =
gm L3
2 P L3
=
π 4 E yi π 4 E yi ( P)
∑
∑
e) III przypadek - całą masę belki podzielić na 3 równe masy: mi=m/3.
Znajduje się one odpowiednio: masa 1 - x1=L/6, masa 2 - x2=0,5L, masa
3 - x3=5L/6. We wszystkich punktach wyznaczyć statyczne ugięcie:
yi(P) dla i=1,2,3. Dodatkowo obliczyć statyczne ugięcie wywołane ciężarem belki Qi=mi·g: yi = mi g ⋅ yi ( P ) / P .
© Politechnika Lubelska, Lublin 2008
14
f) Podstawić powyższe wartości:
Iz =
gm L3
3P L3
=
π 4 E yi π 4 E yi ( P)
∑
∑
g) Jeżeli podział był inny to należy korzystać z zależności:
Iz =
gm L3
m ⋅ P L3
=
π 4 E y i π 4 E mi y i ( P )
∑
∑
h) W przypadku podziału belki na większą ilość części należy postępować
identycznie jak w przypadku II, punkty: (c), (d).
i) Z definicji momentu bezwładności dla zadanej geometrii obliczyć wartość teoretyczną głównego, centralnego momentu bezwładności belki.
Należy pamiętać, że wynik ten będzie również obarczony niedokładnością. Wynika ona z błędów pomiaru wielkości geometrycznych i zaokrągleń w czasie samych obliczeń.
j) Błąd popełniony obliczyć ze wzoru:
δI =
It − Id
It
⋅ 100%
gdzie: It – teoretyczny główny, centralny moment bezwładności belki,
Id – wartość doświadczalna. Błąd należy liczyć oddzielnie dla kolejnych
podziałów.
5. Szkic przekroju poprzecznego belki z dokładnym wymiarowaniem:
6. Pozostałe dane:
Tabela 1
Lp.
1
L
[…]
m
[..]
E
[…]
P
[..]
g
[…]
15
© Politechnika Lubelska, Lublin 2008
7. Przyjęte punkty pomiarowe:
Tabela 2
Wariant I
Punkt
pomiarowy
1
Wariant II
1
2
Wariant III
1
2
3
Współrzędne
punktów
xi […]
Ugięcia
yi(P) […]
8. Wyniki obliczeń:
Tabela 3
Wariant
obliczeń
Moment
bezwładności
doświadczalny
Id […]
Moment
bezwładności
teoretyczny
It […]
Błąd pomiaru
δy =
Id − It
It
⋅100%
I
II
III
Uwaga. Podać wszystkie wzory, podstawienia i wyniki obliczeń teoretycznych i błędów.
9. Wnioski i uwagi końcowe.
Download 123
123.pdf (PDF, 347.34 KB)
Download PDF
Share this file on social networks
Link to this page
Permanent link
Use the permanent link to the download page to share your document on Facebook, Twitter, LinkedIn, or directly with a contact by e-Mail, Messenger, Whatsapp, Line..
Short link
Use the short link to share your document on Twitter or by text message (SMS)
HTML Code
Copy the following HTML code to share your document on a Website or Blog
QR Code to this page

This file has been shared publicly by a user of PDF Archive.
Document ID: 0000030603.