Formelsammlung TM (PDF)
File information
Title: Formelsammlung Technische Mechanik
This PDF 1.4 document has been generated by Writer / OpenOffice.org 1.1.1, and has been sent on pdf-archive.com on 25/01/2012 at 15:07, from IP address 188.174.x.x.
The current document download page has been viewed 2857 times.
File size: 281.37 KB (20 pages).
Privacy: public file



File preview
Fachhochschule Kempten
Formelsammlung Technische Mechanik
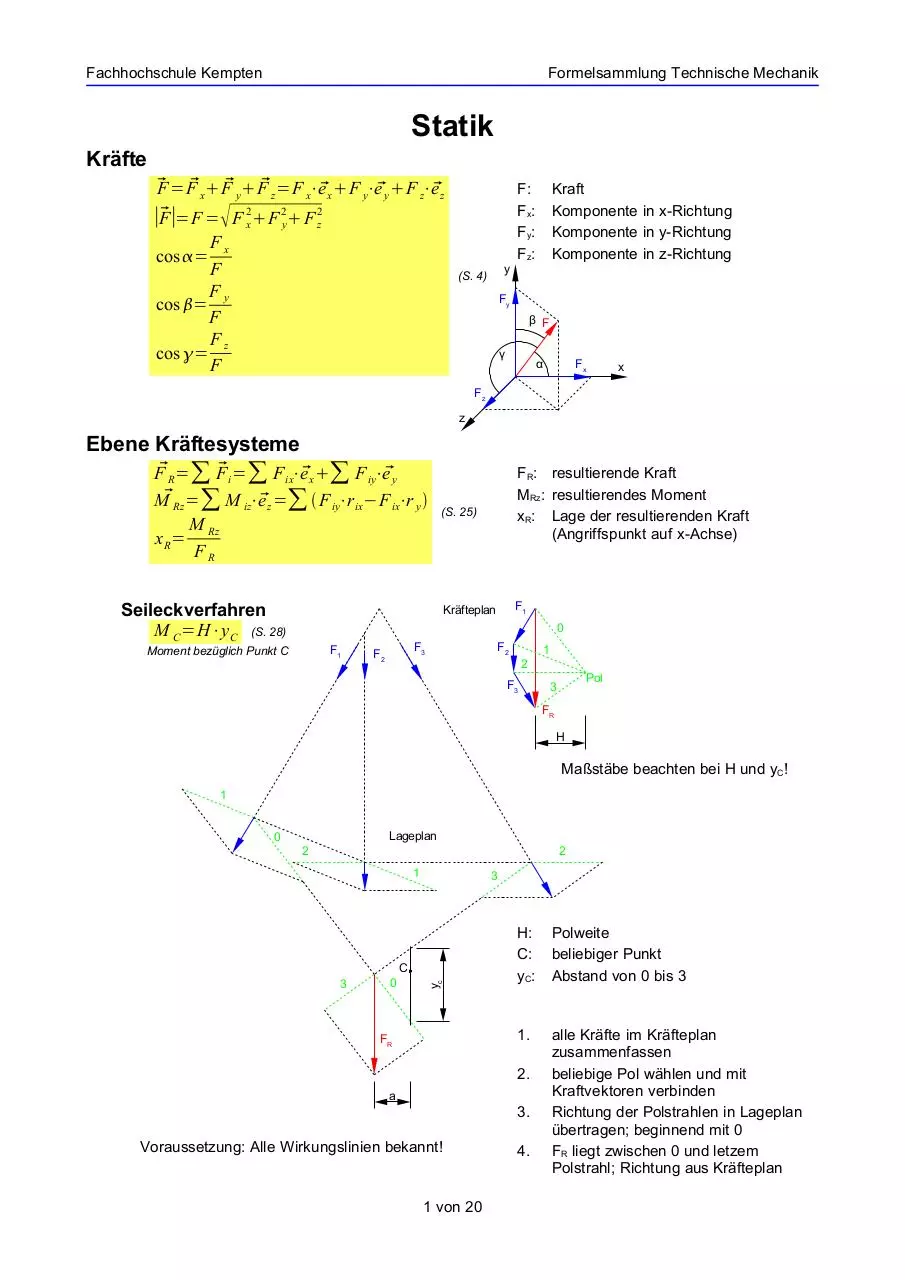
Statik
Kräfte
= Fx F y F z =F x⋅
F
e x F y⋅
e y F z⋅
ez
∣F∣=F = F 2x F 2y F 2z
Fx
F
Fy
cos =
F
F
cos = z
F
F:
Fx:
Fy:
Fz:
cos =
Kraft
Komponente in x-Richtung
Komponente in y-Richtung
Komponente in z-Richtung
y
(S. 4)
Fy
β F
γ
Fx
α
x
Fz
z
Ebene Kräftesysteme
FR=∑ F i =∑ F ix⋅
e x ∑ F iy⋅
ey
MRz =∑ M iz⋅
e z =∑ F iy⋅r ix−F ix⋅r y
M
x R= Rz
FR
Seileckverfahren
M C =H⋅y C (S. 28)
FR: resultierende Kraft
MRz: resultierendes Moment
x R: Lage der resultierenden Kraft
(Angriffspunkt auf x-Achse)
(S. 25)
F1
Kräfteplan
0
F1
Moment bezüglich Punkt C
F2
F3
F2
1
2
F3
Pol
3
FR
H
Maßstäbe beachten bei H und yC!
1
Lageplan
0
2
2
1
3
0
yc
C
3
FR
H:
C:
yC:
Polweite
beliebiger Punkt
Abstand von 0 bis 3
1.
alle Kräfte im Kräfteplan
zusammenfassen
beliebige Pol wählen und mit
Kraftvektoren verbinden
Richtung der Polstrahlen in Lageplan
übertragen; beginnend mit 0
FR liegt zwischen 0 und letzem
Polstrahl; Richtung aus Kräfteplan
2.
a
3.
Voraussetzung: Alle Wirkungslinien bekannt!
1 von 20
4.
Fachhochschule Kempten
Formelsammlung Technische Mechanik
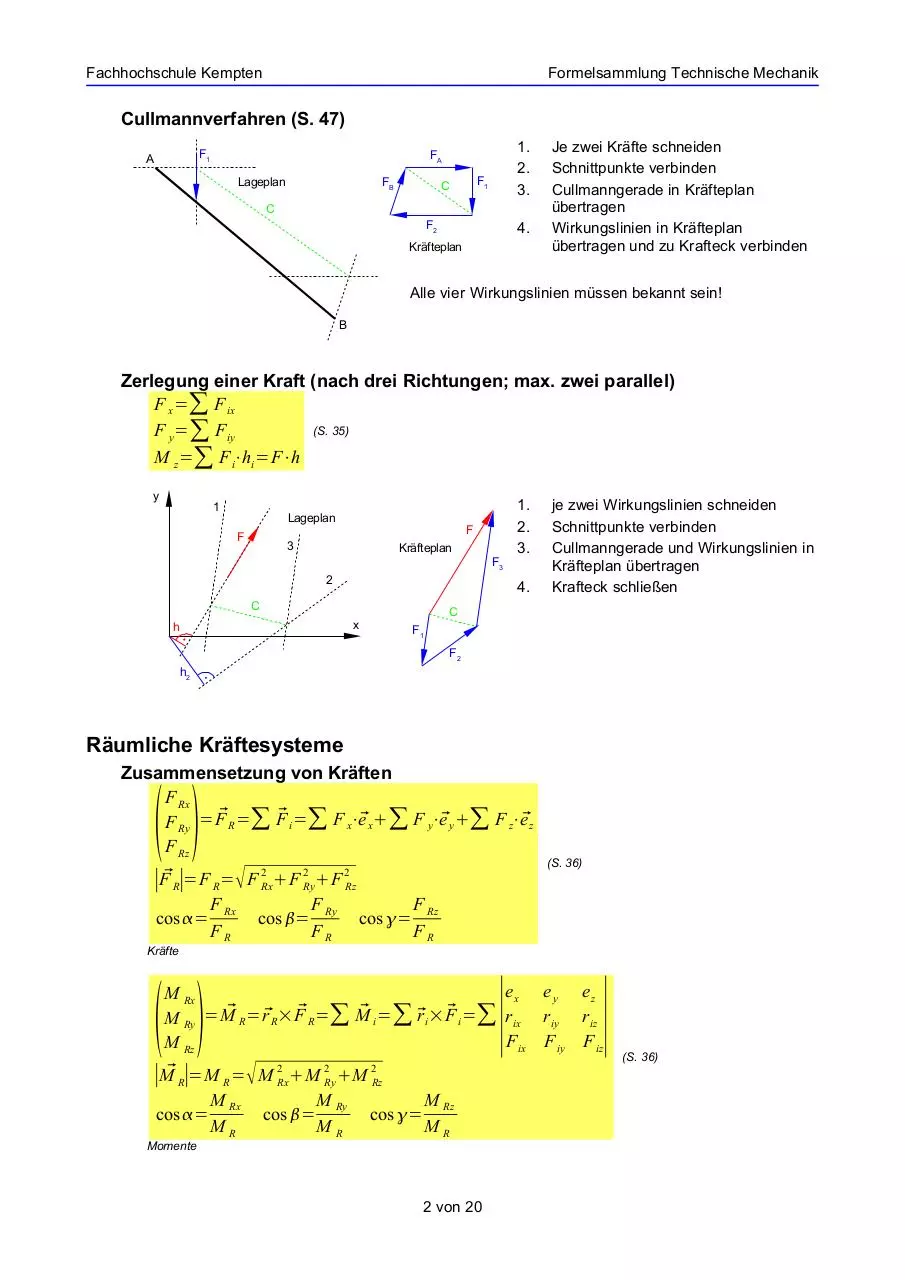
Cullmannverfahren (S. 47)
F1
A
1.
2.
3.
FA
Lageplan
FB
F1
C
C
F2
4.
Kräfteplan
Je zwei Kräfte schneiden
Schnittpunkte verbinden
Cullmanngerade in Kräfteplan
übertragen
Wirkungslinien in Kräfteplan
übertragen und zu Krafteck verbinden
Alle vier Wirkungslinien müssen bekannt sein!
B
Zerlegung einer Kraft (nach drei Richtungen; max. zwei parallel)
F x =∑ F ix
(S. 35)
F y =∑ F iy
M z =∑ F i⋅hi =F⋅h
y
1
Lageplan
F
F
3
Kräfteplan
F3
2
4.
C
x
h
1.
2.
3.
je zwei Wirkungslinien schneiden
Schnittpunkte verbinden
Cullmanngerade und Wirkungslinien in
Kräfteplan übertragen
Krafteck schließen
C
F1
F2
h2
Räumliche Kräftesysteme
Zusammensetzung von Kräften
F Rx
e x ∑ F y⋅
e y ∑ F z⋅
ez
F Ry = FR =∑ F i =∑ F x⋅
F Rz
∣FR∣=F R= F 2RxF 2RyF 2Rz
cos =
F Rx
FR
cos =
F Ry
FR
cos =
(S. 36)
F Rz
FR
Kräfte
∣
∣
ex ey ez
M Rx
i =∑ ri × F i =∑ r
r iy r iz
M Ry = M R = rR × FR =∑ M
ix
F ix F iy F iz
M Rz
∣M R∣=M R= M 2RxM 2Ry M 2Rz
M
M
M
cos = Rx cos = Ry cos = Rz
MR
MR
MR
Momente
2 von 20
(S. 36)
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Zerlegung einer Kraft (nach sechs gegebenen Richtungen)
F
F
F
∑ F i = FR
(S. 40)
cos i = xi cos i = yi cos i = zi
Fi
Fi
Fi
∑ ri × Fi = M R
(S. 40)
jeweils für x-, y- und z-Richtung (6 Gleichungen)
y
MR
Kraftschraube / Dyname
F × M
a =a⋅
e a R 2 R (S. 38)
FR
FR
MRS
Zentralachse
φ
ea
MRF
FR
x
a
z
MRF
Freie Momente
F1
FR=∑ F i
M R=∑ ri × F i ∑ M k
Mk
(S. 40)
FMk
F2
FMk
F3
Freiheitsgrade
In der Ebene drei Freiheitsgrade:
Translation x, y
Rotation z
Im Raum sechs Freiheitsgrade:
Translation x, y, z
Rotation x, y, z
Gleichgewicht
Ebene Kräftesysteme (3 Gleichungen für 3 Unbekannte)
∑ Miz A=0
∑ Fix=0
∑ Fiy=0 oder ∑ Miz B=0 (S. 42)
∑ M iz =0
∑ Miz C =0
A, B, C dürfen nicht auf einer Geraden liegen
{
=3 statisch bestimmt
Anzahl Unbekannte 3 statisch unbestimmt
3 statisch unterbestimmt
Drei Kräfte im Gleichgewicht:
Krafteck geschlossen
Wirkungslinien schneiden sich in einem Punkt
Vier Kräfte im Gleichgewicht:
Krafteck und Seileck geschlossen
es müssen sich je zwei Wirkungslinien schneiden
3 von 20
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Räumliche Kräftesysteme (6 Gleichunen für 6 Unbekannte)
∑ Fix=0 ∑ M ix=0
=6 statisch bestimmt
Anzahl
Unbekannte
F
=0
M
=0
6 statisch unbestimmt
∑ iy
∑ iy
6 statisch unterbestimmt
∑ Fiz =0 ∑ M iz=0
{
Freischneiden eines Körpers
F1
F1
1
5
F5
4
F2
F12
F2
1
2
F21 2
3
Gegenwirkungsprinzip
F3
F4
Kräfte auf 'freigeschnittene' Körper sind Kräfte von der Umgebung auf den Körper!
Lagerungen und Lagerreaktionen
(S. 63)
Bauart
Ausprägung
Symbol
Reaktionen
Wertigkeit
Ebene Raum Ebene Raum
Querlager
1
2
Gleitlager
1
1
Rollenlager
()
1
1 (2)
Stablager
1
1
Quer- und
Längslager
2
3
festes Gelenk
2
3
feste
Einspannung
3
6
Feste Einspannungen nehmen auch Momente auf! Ebene=1; Raum=3
4 von 20
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Prinzip der virtuellen Arbeit
Virtuelle Verschiebung
F K⋅a⋅ =F Q⋅b⋅
b
a·δφ
a
FK:
FQ:
a:
b:
b·δφ
(S. 73)
δφ
Kraft
Last
Kaftweg
Lastweg
Q
FK
Virtuelle Arbeit
⋅ r
W =F
W =∑ F is⋅ si ∑ M i ⋅ i
FQ
W: virtuelle Arbeit
Fis: Kraftkomponente in Richtung des
Weges
si: Wegelement
Miφ: Momente um Drehachse
φi: Drehwinkel
(S. 74)
Gleichgewichtsarten
(S. 84)
stabil
labil
indifferent
2
1
1
2
2
1
Gleichgewicht: δW = 0
FS
FS
2
1
0
FS
M S =G⋅r
M K =F⋅h
1
0
δs
δs
FS = 0
2
1
δW02 < 0
Standsicherheit
δW10 < 0
δW02 > 0
δW10 = δW02 = 0
r
F
(S. 85)
G
S: Standsicherheit
MS: Standmoment
MK: Kippmoment
h
∑MS
∑MK
δs
0
FS
δW10 > 0
S=
δs
δs
Kippkante
δs
S 1
Einflußlinie / Wanderlast
F Ay =F⋅ x
x
x=1−
l
x
η:
F
FAx
A
FAy
B
l
FBy
5 von 20
Einflußfunktion
2
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Systeme starrer Körper
Tragwerke
f =3⋅n2⋅k −s−z t
(S. 86)
f:
s:
n:
k:
zt:
r:
eben
f =6⋅n−3⋅k −s−z t
(S. 92)
räumlich
f
{
0 statisch unbestimmt
=0 statisch bestimmt
0 nicht tragfähig
Fachwerke
s=2⋅k −r
s=3⋅k −r
(S. 99)
eben
Freiheitsgrad des Tragwerks
Anzahl der Stäbe
Anzahl der restlichen Tragwerkteile
Anzahl der Stabknoten
Anzahl der restl. Zwangsbedingungen
Auflagerreaktionen
(S. 131)
räumlich
Ermittlung von Stabkräften
Knotenpunktverfahren (S. 104)
Knoten freischneiden
Stabkräfte als Zugkräfte einführen
αI
∑ F ix=0
∑ F iy=0
F AxS 1S 2⋅cos I =0
F Ay S 2⋅sin I =0
Beispiel für Knoten I
III
2
A
3
I
6
S2
V
9
VI
IV
FAx
1
II 4
F
8
a
B
αI
I
S1
FBy
a
S3
S2
FAx
FAy
a
S5
S3
7
5
S6
III
a
•
•
S4
II
S1
FAy
Schnittverfahren nach Ritter (S. 107)
Lagerreaktionen
Fachwerk in zwei Teile teilen
höchstens drei unbekannte Stäbe dürfen geschnitten werden
Wirkungslinien dürfen sich nicht in einem Punkt schneiden
F Ax=0
1
F Ay = ⋅F
3
III
2
F By = ⋅F
3
2
Lagerreaktionen
∑ M III =0
∑ M A=0
∑ F ix=0
A
1
S2
9
7
5
II 4
VI
F
8
FAy
a
a
III
S6
Ermittlung der Stabkräfte
∑ F ix=0
V
IV
FAx
S 4=F Ay
S 6=−S 5⋅ 2
2
S 5=− ⋅F
3
3
I
6
a
•
•
•
•
S5
I
2
=− ⋅F
II
3
FAy
Gleichgewicht an I
6 von 20
S4
a
B
FBy
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Cremonaplan (S. 110)
Lageplan
Auflagergrößen
Nullstäbe kennzeichnen
Kraftecke schließen (Beginn bei Knoten mit 2 Unbekannten; mathematisch positiver
Knoten-Umlauf)
jede Kraft kommt nur einmal im Cremonaplan vor
•
10
VI
13
9
11
IIX
A
V
Nullstab
4 II
5
7
12 F VII 8
IV
6
12
1
3
I
III 2
Lageplan
FAx
a
a
a
a
IIX
FAx
a
•
•
•
•
11
13
VI
B
Cremonaplan
FBx
4
FBx
I
1 II 3
2
10
5 V
III
6
9
Schwerpunkt
rs =
1
⋅∫ r⋅dF G
FG
rS:
x S:
yS:
Li:
Lges:
Ai:
Ages:
Vi:
Vges:
x i:
(S.136)
allgemein
xS =
∫ x⋅dL
(S. 140)
∫ x⋅dA
(S. 142)
∫ x⋅dV
(S.141)
∑ Li⋅xi
∑ Li
yS=
∑ Ai⋅xi
∑ Ai
yS=
∑ V i⋅xi
∑Vi
yS=
L ges
Linienschwerpunkt
xS =
A ges
Flächenschwerpunkt
xS =
V ges
Ortsvektor Schwerpunkt
Schwerpunktkoordinate in x-Richtung
Schwerpunktkoordinate in y- Richtung
Einzellängen
Gesamtlänge
Einzelflächen
Gesamtfläche
Einzelvolumen
Gesamtvolumen
Schwerpunktkoordinate in x-Richtung
der Einzelteile
Volumenschwerpunkt
Guldin'sche Regel (rotationssymmetrische Teile)
A=2 ⋅y S⋅s
A: Oberfläche
Oberfläche
V:
yS:
s:
V =2 ⋅y s⋅A
Volumen
7 von 20
Volumen
Schwerpunktkoordinate in y-Richtung
Länge einer Mantellinie
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Reibung
Haftreibung
R H =0⋅N
ρ0
F Fn
(S. 147)
(Coulombsches Gesetz)
tan o=
Ft
RH
=0
N
Gleitreibung
RG =G⋅N
N
G 0
(S. 149)
0
S =S 1⋅e
Rmax
(S. 147)
Seil- und Riemenreibung
⋅
R=S 2−S 1=S 1⋅e −1
M =a⋅R
ρ0
S 2S 1
(S. 157)
(S. 157)
0⋅
(S. 157)
RH:
μ0:
ρ0:
F:
N:
Haftreibkraft
Haftreibzahl
Reibungswinkel
Kraft
Normalkraft
RG: Gleitreibkraft
μG: Gleitreibzahl
N: Normalkraft
R:
M:
S:
β:
μ0:
a:
Reibkraft
übertragbares Moment
Seilreibung
Umschlingungswinkel
Haftreibzahl
Radius der Riemenscheibe
H:
V:
η:
q:
Horizontalkraft
Vertikalkraft
Durchhang
Streckenlast
a:
b:
l:
x:
H:
L:
Q:
S:
V:
η:
Seillänge horizontal
Seillänge vertikal
Seillänge ohne Durchhang (gedacht)
Laufvariable
Horizontalkraft
Seillänge
Seilgewicht
Seilkraft
Vertikalkraft
Durchhang
Seile, Ketten, Stabketten
Seile unter kontinuierlicher Belastung
H⋅' ' =−q x (S. 160)
Differentialgleichung des Durchhangs
H⋅y ' ' =V ' =q x (S. 161)
Differentialgleichung der Seilkurve
Seile mit schwachem Durchhang
Q⋅x
=
⋅a− x (S. 160)
2⋅H⋅a
max x=
a
Q⋅a
=
2
H⋅8
(S. 160)
b
Q
a 2⋅H
b
Q
V min x=0=H⋅ −
a 2⋅H
V max x=a=H⋅
S = H V
2
L≈l
2
(S. 163)
(S. 163)
q * 2a 4
24⋅H 2⋅l
(S. 163)
*
q=
Q Q
≈
L l
8 von 20
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Seile unter Eigengewicht (bei beliebigem Durchhang)
H
q*
a: Seillänge horizontal
y= *⋅cosh
⋅ x− x 0 C 1 (S. 165)
b: Seillänge vertikal
H
q
[
{ [
]
]
[ ]}
H
q*
q*
L= *⋅ sinh ⋅ a−b sinh ⋅x 0
H
H
q
S = H 2V 2
q *=
(S.166)
(S. 165)
Q Q
≈
L l
l:
q*:
x:
H:
L:
Q:
S:
Seillänge ohne Durchhang (gedacht)
Streckenlast
Laufvariable
Horizontalkraft
Seillänge
Seilgewicht
Seilkraft
Stützlinien von Bogenträgern
Stützlinie des stetig gekrümmten Bogenträgers mit konstanter Vertikallast
q⋅a 2 (S. 166)
H D=
8⋅h
D= H V
2
D
h
a
V D =q⋅
2
HD
HD
D
a
D
2
D
VD
(S. 166)
VD
Stützlinie des überschütteten Bogenträgers
y' '
⋅h− y=0
HD
h1
h
Differentialgleichung
=⋅g
y=h−C 1⋅cosh
y
HD
HD
x
[
x
⋅ x−C 2
HD
]
D
D
VD
VD
Hydrostatik
p=
dF
dA
=
dm
dV
A:
F:
V:
m:
p:
ρ:
9 von 20
Fläche
Kraft
Volumen
Masse
Druck
Dichte
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Kinematik
Bewegung eines Punktes
Im karthesischen Koordinatensystem
e x y t ⋅
e y z t ⋅
e z (S. 1)
r t = x t ⋅
e x y˙ ⋅
e y z˙⋅
ez
v =r˙ = x˙⋅
∣v∣= x˙ 2 y˙ 2 z˙ 2= v 2x v 2y v 2z
e x y¨ ⋅
e y z¨⋅
ez
a =v˙ = r¨ = x¨ ⋅
∣a∣= x¨ 2 y¨ 2 z¨ 2= a 2x a 2y a 2z
(S. 2)
(S. 3)
Im Polarkoordinatensystem
e r (S. 4)
r =r t ⋅
e r r⋅⋅
v =r˙ t = r˙⋅
˙ e
d
==
˙
dt
Beschleunigung
Einheitsvektoren
Ortsvektor
Geschwindigkeit
e:
v:
a:
R:
Einheitsvektoren
Geschwindigkeit
Beschleunigung
Abstand zum Momentanzentrum
a:
e:
r:
v:
α:
φ:
ω:
Beschleunigung
Einheitsvektoren
Ortsvektor
Geschwindigkeit
Winkelbeschleunigung
Winkel von Ortsvektor
Winkelgeschwindigkeit
(S. 2)
Im Normal-Tangential-System (Ebene)
e t (S. 3)
v =v⋅
v2
e
⋅
e
a = v⋅
˙ t
R n
a:
e:
r:
v:
(S. 4/5)
2
r˙⋅
a =v˙ =r¨ = r¨ −r⋅
˙ ⋅er r⋅2⋅
˙ ⋅e
¨
2
d
=
¨ ==
˙
dt
(S. 5)
Umrechnung karthesische, polare Koordinaten
cos −sin v r
cos sin v x
vx
vr
=
⋅
=
⋅
sin cos
−sin cos v y
vy
v
v
gilt analog für Beschleunigung
Sonderfall: Ebene Kreisbewegung
v=r⋅ (S. 11)
[ ]=
1
s
⋅n
[ ]
1
min
a:
n:
r:
v:
ω:
(S. 11)
30
e r r⋅⋅
a =v˙ =−r⋅
˙ ⋅
¨ e˙
2
(S.13)
10 von 20
Beschleunigung
Drehzahl
Kreisradius
Geschwindigkeit
Winkelgeschwindigkeit
(S. 7)
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Bewegung starrer Körper
Translation
Es gelten die Gleichugen für die Punktbewegungen, da sich der Körper nicht dreht!
Rotation
r
v = r˙ =×
(S. 15)
a =v˙ =r¨ = ×
˙ r ×
r˙
(S. 15)
Allgemeine Bewegung
rP= r0r (S. 17)
e
v = v0⋅r⋅
(S. 17)
vT
Euler
×
˙ r
×
r
¨0 ×
a = r
aT
at
(S. 18)
aZ
Bewegung in der Ebene
e t (S. 20)
v = v0⋅r⋅
2
en
a = a0 ⋅r⋅
˙ e t ⋅r⋅
(S. 20)
Geschwindigkeitspol (Momentanzentrum)
vA vB
= = (S. 21)
rA rB
a:
r:
v:
ω:
Beschleunigung
Ortsvektor
Geschwindigkeit
Winkelgeschwindigkeit
a:
at:
aT:
aZ:
e:
rP:
r0:
r:
v:
v 0:
v T:
ω:
Beschleunigung
Tangentialbeschleunigung
Translationsbeschleunigung
Zentripedalbeschleunigung
Einheitsvektor
Ortsvektor
Vektor der Translation
Vektor der Rotation
Geschwindigkeit
Rotationsgeschwindigkeit
Translationsgeschwindigkeit
Winkelgeschwindigkeit
a:
e:
r:
v:
ω:
Beschleunigung
Einheitsvektoren
Ortsvektor
Geschwindigkeit
Winkelgeschwindigkeit
r:
v:
ω:
Ortsvektor
Geschwindigkeit
Winkelgeschwindigkeit
Methode der gleichen Winkel (S. 23)
•
•
•
•
•
•
maßstäblich zeichnen
überlegen wie die Geschwindigkeiten orientiert sind
Senkrechte zu Geschwindigkeiten ergeben Pol
Linie von Pol aus auf Geschwindigkeitsspitze
Winkel α übertragen
Pol ist Momentanzentrum
Pol
ω
α
α
vA
B
11 von 20
vB
A
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Methode der gedrehten Geschwindigkeiten (S. 23)
•
•
•
•
•
maßstäblich zeichnen
überlegen wie die Geschwindigkeiten orientiert sind
Startgeschwindigkeit um 90° drehen
Parallele zu Verbindungsstange zeichnen
resultierende Geschwindigkeit um 90° drehen
(in gegengesetze Richtung)
Relativbewegung
vabs=
r˙0×
r˙rel
rrel
vF
vrel
vA
B
A
vB
aabs=
r¨0 ×
× vrel
v˙rel
˙ rrel ×
×
rrel 2⋅
aF
aabs:
aF:
aC:
arel:
r0:
aC
arel
Beschleunigung
Führungsbeschleunigung
Coriolisbeschleunigung
Relativbeschleunigung
Vektor vom raumfesten zum bewegten
Koordinatensystem
rrel: Vektor vom bewegten
Koordinatensystem zu einem Punkt
v abs: Geschwindigkeit
v F: Führungsgeschwindigkeit
v rel: Relativgeschwindigkeit
ω: Winkelgeschwindigkeit
12 von 20
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Kinetik
Grundbegriffe
Arbeit
⋅d r =∣F
∣⋅∣d r∣⋅cos =F⋅cos ⋅ds=F t⋅ds
dW = F
W =∫ dW =∫ F t⋅ds=∫ F x⋅dxF y⋅dyF z⋅dz
W =−∫ dU =−U 2−U 1 =U 1−U 2
(S. 2)
für F ist Potentialkraft
W =∫ M t⋅d
(s. 3)
Arbeit aus Drehmoment
Leistung
dW
P=
dt
P=M t⋅
(S. 3)
(S. 3)
Leistung aus Drehmoment
Wirkungsgrad
P
P P P
ges= ab = 1 ⋅ 2⋅ ab =1⋅2⋅3
P zu P zu P 1 P 2
(S. 4)
(S. 1)
r:
s:
F:
M:
U:
W:
β:
φ:
Richtungsvektor der Bewegung
Weg
Kraft
Moment
Potential
Arbeit
Winkel zwischen F und r
Drehwinkel
t:
M:
P:
W:
ω:
Zeit
Moment
Leistung
Arbeit
Winkelgeschwindigkeit
P:
η:
Leistung
Wirkungsgrad
a:
m:
t:
v:
F:
Beschleunigung
Masse
Zeit
Geschwindigkeit
Kraft
m:
v:
E:
U:
W:
Masse
Geschwindigkeit
kinetische Energie
Potential
Arbeit
Kinetik des Massepunktes (Newton)
Grundgesetz der Bewegung
d v
FR=∑ F i =m⋅ =m⋅a (S. 5)
dt
quasi statische Gleichung
FR=m⋅a =0
(S. 5)
Trägheitskräfte, d'Alembertsche Hilfskraft
Arbeits- und Energiesatz
1
W 12= ⋅m⋅v 22 −v 12 =E 2−E 1
2
W 12=U 1−U 2=E 2−E 1
U 1E 1=U 2E 2=const.
(S. 5)
(S. 5)
Energieerhaltungssatz
13 von 20
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Impulssatz
p12=m⋅ v2− v1 = p2− p1
∫ FR⋅dt=0
für
gilt
(S. 5)
m⋅
v 2=m⋅
v 1=const.
m:
p:
t:
v:
F:
(S. 5)
Masse
Impuls
Zeit
Geschwindigkeit
Kraft
Impulsmomenten-, Flächen- und Drehimpulssatz
=r ×m⋅v =r ×p (S. 11)
D
Drall
=r ×m⋅d v = d ⋅r ×m⋅v = dD = D
˙
M R =r × F
dt dt
dt
(S. 11)
Impulsmomentensatz
d
d
d2 A
M R= ⋅r ×m⋅v =m⋅ ⋅r ×v =2⋅m⋅ 2
dt
dt
dt
Flächensatz
t2
t2
t1
t1
∫ M R⋅dt=∫ ddtD⋅dt= D2− D1
(S. 12)
Drehimpulssatz
M R =0
für
gilt
1= D 2=const.
D
(S. 12)
(S. 12)
m:
p:
r:
t:
v:
A:
D:
F:
M:
Masse
Impuls
Ortsvektor
Zeit
Geschwindigkeit
Fläche
Drall
Kraft
Moment
a:
m:
F:
Beschleunigung
Masse
Kraft
m:
v:
W:
Masse
Geschwindigkeit
Arbeit
m:
p:
v:
F:
Masse
Impuls
Geschwindigkeit
Kraft
Kinetik des Massepunktesystems
Schwerpunktsatz
n
n
∑ F i =∑ mi⋅ai =m⋅a S
i=1
(S. 12)
i=1
Arbeitssatz
n
W 12=∑
i=1
mi 2
⋅ v i2 −v i12
2
(S. 13)
Falls kein Potential vorliegt (keine Verluste),
dann gilt der Energieerhaltungssatz!
Impulssatz
n
p2− p1=∑ mi⋅ vi2 − vi1 =m⋅ vS2 − vS1
(S. 13)
i=1
für
∑ F i =0
gilt
∑ mi⋅v i1=∑ mi⋅vi2=const.
m⋅vS1=m⋅vS2 =const.
14 von 20
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Impulsmomentensatz
˙
d
dD
M R= ⋅∑ ri ×m⋅
v i =
=D
dt
dt
D:
MR:
m:
r:
v:
(S. 16)
=∑ ri ×m⋅
D
vi
Drehimpulssatz
D
2− D
1
∫ M R dt=∫ d D=
für
(S. 16)
Drall
resultierendes Momemt
Masse
Ortsvektor
Geschwindigkeit
D: Drall
MR: resultierendes Momemt
1= D2 =const.
M R=0 folgt D
Kinetik des starren Körpers
Translation
1
rF = ⋅∫ r dm
m
(S. 22)
Definitionsgleichung für Massenmittelpunkt
Rotation (Achse fest)
M Rx=−˙ z⋅I xz 2z⋅I yz
M Ry =−˙ z⋅I yz 2z⋅I xz
M Rz =˙ z⋅I z
W 12=∫ I z
(S: 24)
d z
I
⋅d = z⋅2z −2z
dt
2
2
m:
r:
rF:
Masse
Ortsvektor
Führungsvektor
D:
I:
MR:
W:
ω:
Drall
Massenträgheitsmomente
resultierendes Momemt
Arbeit
Winkelgeschwindigkeit
(S: 24)
1
Arbeitssatz
d
D 2− D1=∫ I z⋅ ⋅dt= I z⋅ z − z
dt
2
(S: 24)
1
Drehimpulssatz
für Rotationsachse gleich Hauptträgheitsachse folgt: Zentrifugalmomente = 0!
Massenträgheitsmomente
I z =∫ x 2 y 2 dm=∫ r 2z dm
I x =∫ y z dm=∫ r dm
2
2
2
x
2
y
D:
I:
(S: 25)
Drall
Massenträgheitsmomente
I y =∫ x z dm=∫ r dm
2
2
axiale Massenträgheitsmomente
I xz =∫ x⋅z dm= I zx
I yz =∫ y⋅z dm=I zy
(S: 25)
I xy =∫ x⋅y dm= I yx
Zentrifugal- / Deviationsmomente
1
I p = ⋅ I x I y I z
2
I x −I xy −I xz x
Dx
D=
=
−I yx I y −I yz ⋅ y
Dy
−I zx −I yz
Iz
Dz
z
Drall; Trägheitstensor
(S: 25)
polares Massenträgheitsmoment
15 von 20
(S. 25)
Fachhochschule Kempten
Formelsammlung Technische Mechanik
M
S
M
S
M
S
M
S
M
S
M
S
I z = I z m⋅r 2z
I y = I y m⋅r 2y
I x = I x m⋅r 2x
I:
Massenträgheitsmomente
M: Momentanzentrum
S: Schwerpunkt
i:
Trägheitsradius
m: Masse
m red: reduzierte Masse
rred: reduzierter Abstand (theoretisch!)
x S: Schwerpunktkoordinate
yS: Schwerpunktkoordinate
I xy = I xy m⋅x s⋅y s
I xz = I xz m⋅x s⋅z s
(S. 27)
I yz = I yz m⋅y s⋅z s
Steinerscher Satz (Umrechnung auf andere Achsen)
i=
I
m
(S. 28)
Trägheitsradius
m red =
I
r 2red
(S. 28)
reduzierte Masse
Bewegung starrer Körper in der Ebene
I
I
m
m
W 12= ⋅v 2S S⋅2S − ⋅v 2S S⋅2S =E 2−E 1
2
2
2
2
2
2
Arbeitssatz
1
1
d
M R= ⋅− z⋅I zx⋅
e x − z⋅I zy⋅
e y z⋅I z⋅
ez
dt
(S. 36)
Impulsmomentensatz
d
∣M R∣=M R= dt ⋅S⋅I S
D:
E:
I:
M:
W:
e:
m:
p:
v:
ω:
(S. 36)
Impulsmomentensatz für z gleich Hauptträgheitsachse
p=m⋅ v2− v1 = p2 − p1
(S. 36)
Impulssatz
1
D= I S⋅
2−
1 = D 2− D
(S. 36)
Drehimpulssatz
Allgemeine räumliche Bewegung
∑ M i= D˙ = dtd ⋅∫ r ×v dm
∑ F i=m⋅a
Schwerpunktsatz
Drall
Energie
Massenträgheitsmomente
Moment
Arbeit
Einheitsvektoren
Masse
Impuls
Geschwindigkeit
Winkelgeschwindigkeit
(S. 38)
Momentensatz
I x −I xy −I xz x
D = I⋅
= −I yx I y −I yz ⋅ y
−I zx −I zy
Iz
z
I1 0 0
1
D = I⋅
= 0 I 2 0 ⋅ 2
0 0 I 3 3
Drall
(S. 36)
˙ 1⋅I 12⋅3⋅ I 3− I 2
M R= ˙ 2⋅I 23⋅1⋅ I 1−I 3
˙ 3⋅I 31⋅2⋅ I 2−I 1
(S. 38)
D:
F:
I:
I:
M:
a:
m:
r:
v:
ω:
(S. 39)
Eulersche Bewegungsgleichungen für Hauptträgheitsachsen in Schwerpunkt
16 von 20
Drall
Kraft
Massenträgheitsmomente
Trägheitstensor
Moment
Beschleunigung
Masse
Ortsvektor
Geschwindigkeit
Winkelgeschwindigkeit
Fachhochschule Kempten
Formelsammlung Technische Mechanik
m⋅v 2S 1
2
2
2
E=
⋅ I 1⋅1 I 2⋅2 I 3⋅3
2
2
D:
E:
I:
M:
m:
v:
ω:
(S. 39)
kinetische Energie
∫ M R dt=∫ d D = D2− D1
(S. 39)
Drehimpulssatz
R=0 folgt D
2= D
1=const. ,
Für M
d. h. Drallvektor behält seine Richtung bei.
Drall
kinetische Energie
Massenträgheitsmomente
Moment
Masse
Geschwindigkeit
Winkelgeschwindigkeit
Relativbewegung
aabs=
r¨0×
× vrel v
˙ rrel ×
×
rrel 2⋅
˙rel
aC
aF
Beschleunigung
FR=m⋅a =m⋅
a F m⋅
a C m⋅arel
(S. 44)
Grundgesetz
Aufstellen von Bewegungsgleichungen
(S. 44)
arel
aabs:
aF:
aC:
arel:
r0:
Beschleunigung
Führungsbeschleunigung
Coriolisbeschleunigung
Relativbeschleunigung
Vektor vom raumfesten zum bewegten
Koordinatensystem
rrel: Vektor vom bewegten
Koordinatensystem zu einem
Punkt
v rel: Relativgeschwindigkeit
ω: Winkelgeschwindigkeit
Prinzip von d'Alembert (S. 45)
aus FR =m⋅
a folgt FR−m⋅a =0 mit
a =v˙ = r¨
˙ folgt M − D
˙ =0
aus M R = D
R
Hilfskraft und -moment in negativer Richtung einführen!
•
•
•
geeignetes KOS wählen
freischneiden und Größen antragen
Gleichgewichtsbedingungen aufstellen
Lagrange-Gleichungen
d ∂E
∂E
(S. 54)
Q=
−
dt ∂ q˙
∂q
q:
E:
L:
U:
Lagrange-Gleichung 1. Art
d ∂L
∂L
−
=0
dt ∂ q˙
∂q
(S. 55)
Lagrange-Gleichung 2. Art
L=E −U
Lagrange-Funktion
q=s
q=
˙ s˙ =v
Q=F
q=
q=
˙
˙ =
Q=M
17 von 20
allgemeine Koordinate
kinetische Energie
Lagrange-Funktion
potentielle Energie
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Stoß
Allgemeine Vorbemerkung
v −v
k = e2 e1 (S. 64)
v a1−v a2
k:
v e:
v a:
Stoßzahl, in Normalrichtung
Stoßzahl
Geschwindigkeit nach dem Stoß
Geschwindigkeit vor dem Stoß
0k 1
k
Holz
Glas
Stahl
plastisch
elastisch
0,50
0,95
0,65
0,00
1,00
Zentraler, gerader Stoß
1
v e1=
⋅[ m ⋅v m2⋅v a2 −k⋅m2⋅v a1−v a2 ]
m1m2 1 a1
1
v e2=
⋅[ m2⋅v a2m 2⋅v a2k⋅m 2⋅v a1−v a2 ]
m1 m2
(S. 65)
Geschwindigkeiten im Bereich e
v *=
1
⋅m1⋅v a1m 2⋅v a2
m1m2
k:
m:
v:
E:
(S. 66)
Geschwindigkeit im Bereich g
1 m ⋅m
E I = ⋅ 1 2 ⋅v a1−v a2 2
2 m1m 2
Stoßzahl
Masse
Geschwindigkeit
kinetische Energie
(S. 66)
Energieverlust in Phase Ι (Zusammenstoß)
1 m ⋅m
E I I =− ⋅ 1 2 ⋅v e2 −v e1 2
2 m1m 2
(S. 66)
Energieverlust in Phase ΙΙ (Auseinanderdriften)
1 m ⋅m
E ges = ⋅ 1 2 ⋅v a1−v a2 2⋅1−k 2
2 m1m2
(S. 66)
Gesamtenergieverlust
Zentraler, schiefer Stoß
v a1=v a1⋅cos
v a2 =v a2⋅cos
(S. 68)
v e1=v e1⋅sin '
v e2=v e2⋅sin '
ve
1
α'
α
t
ve
β
2
β'
n
va
va
Neues v in Formeln vom zentralen, 1geraden Stoß einsetzen
und damit weiterrechnen!
2
18 von 20
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Allgemeiner, exzentrischer Stoß
I
m 2red = 2A (S. 69)
A
l
ω
l:
m:
v:
IA:
ω:
reduzierte Masse auf B
v 2(B) =⋅l
m
(S. 69)
Geschwindigkeit von B
1
v
l
m 2,
IA
Länge von A bis B
Masse
Geschwindigkeit
Massenträgheitsmoment um A
Winkelgeschwindigkeit
1
B
Desweiteren gelten die Formeln des zentralen, geraden Stoßes!
Allgemeiner Drehstoß
I
m1red = 21 (S. 69)
l1
v 1(B)=1⋅l 1
m 2red =
I2
2
l2
ω1
(S. 69)
v 2(B) =2⋅l 2
ω2
I1
(S. 69)
l:
m:
v:
I:
ω:
Abstand
Masse
Geschwindigkeit
Massenträgheitsmoment
Winkelgeschwindigkeit
I2
B
l2
l1
(S. 69)
Desweiteren gelten die Formeln des zentralen, geraden Stoßes!
Schwingungen
Freie, ungedämpfte Schwingung
m⋅g
(S. 76)
x stat =
c
c:
f:
g:
m:
x:
T:
ω0:
statische Ruhelage
c
x¨ ⋅x=0
m
(S. 76)
Schwingungsdifferentialgleichung
0 =
c
m
(S. 76)
Eigenkreisfrequenz
T=
2⋅
m
=2⋅⋅
c
0
Schwingungsdauer
(S. 76)
f=
1
T
(S. 76)
Frequenz
19 von 20
Federrate
Frequenz
Fallbeschleunigung
Masse
Auslenkung
Schwingungsdauer
Eigenkreisfrequenz
Fachhochschule Kempten
Formelsammlung Technische Mechanik
Bestimmung der Federrate
Elastisches System (Stabmasse wird vernachlässigt)
c=
3⋅E⋅I
l3
c=
(S. 76)
48⋅E⋅I
l3
E,
I
m
l
E,
I
m
c:
l:
E:
I:
Federrate
Abstand
E-Modul
Flächenmoment
m:
m F:
x:
E:
angehängte Masse
Federmasse
Auslenkung
kinetische Energie
c:
l:
G:
I t:
φ:
ω:
Federrate
Federlänge
Schubmodul
Flächenmoment der Torsion
Drehwinkel
Winkelgeschwindigkeit
l/2
l
Federrate bei Federschaltungen
1
1
=∑
c ges =∑ ci
c ges
ci
Reihenschaltung
Parallelschaltung
Berücksichtigung der Federmasse
m
x˙ 2
E kin= ⋅ m F (S. 79)
2
3
Drehschwingung
G⋅I t
(S. 80)
c=
l
Drehfederrate
2
¨
0⋅=0
(S. 80)
Schwingungsdifferentialgleichung
20 von 20
Download Formelsammlung TM
Formelsammlung TM.pdf (PDF, 281.37 KB)
Download PDF
Share this file on social networks
Link to this page
Permanent link
Use the permanent link to the download page to share your document on Facebook, Twitter, LinkedIn, or directly with a contact by e-Mail, Messenger, Whatsapp, Line..
Short link
Use the short link to share your document on Twitter or by text message (SMS)
HTML Code
Copy the following HTML code to share your document on a Website or Blog
QR Code to this page
This file has been shared publicly by a user of PDF Archive.
Document ID: 0000036518.