Radar Eletronico (PDF)
File information
This PDF 1.5 document has been generated by TeX / pdfTeX-1.40.17, and has been sent on pdf-archive.com on 16/05/2017 at 10:10, from IP address 168.181.x.x.
The current document download page has been viewed 472 times.
File size: 592.97 KB (10 pages).
Privacy: public file



File preview
Universidade Tecnologica Federal do
´
Parana
˜o
Engenharia de computac
¸a
Microcontroladores
Lombada eletrˆ
onica
Autores:
Gustavo Morais
´ jo
Lucas Arau
Pedro Silva
12 de Maio, 2017
Contents
1 Introdu¸
c˜
ao
2
2 Requisitos funcionais
3
3 Oscilador Colpitts
4
4 Varredura da frequˆ
encia no 8051
4.1 Rotina de inicializa¸c˜ao . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Detec¸c˜
ao da frequˆencia . . . . . . . . . . . . . . . . . . . . . . . .
5
5
5
5 Impress˜
ao da Velocidade e Alerta
5.1 Multiplexa¸c˜
ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Rotinas desenvolvidas . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Buzzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
6
7
8
6 Conclus˜
ao
8
1
1
Introdu¸
c˜
ao
Nesta experiˆencia, objetivou-se criar um prot´otipo de radar eletrˆonico, baseado
em indutores, chamado pelo professor como lombada eletrˆonica.
O prot´
otipo verificava a velocidade do carrinho met´alico e mostrar essa velocidade em dois displays de sete segmentos, caso ultrapasse a velocidade limite
escolhida, no caso de 40km/h, um buzzer e um led devem ser ativados.
A verifica¸c˜
ao ´e feita atrav´es de um circuito oscilador Colpitts, onde usou-se
dois indutores feitos usando um n´
ucleo de ferrite e fio de cobre. A varredura da
oscila¸c˜
ao dos circuitos ´e realizada atrav´es de rotinas escritas em Assembly em
um microcontrolador 8051, que identifica picos atrav´es dos pinos de interrup¸c˜ao
e contabiliza a diferen¸ca de tempo entre eles.
Um esquem´
atico geral do projeto com todas as partes integradas pode ser
visualizado na figura 1 e uma figura com o projeto montado e devidas partes
identificadas encontrra-se na figura 2.
Figure 1: Hardware Geral do Projeto
2
Figure 2: Hardware Geral do Projeto
2
Requisitos funcionais
Em seguida est˜
ao os requisitos funcionais que o sistema deveria alcan¸car, especificados pelo professor.
• Detectar a velocidade do veiculo met´alico passando na pista.
• Mostrar a velocidade para o usu´ario por meio de display de sete segmentos.
• Tocar um buzzer caso a velocidade ultrapasse 40 km/h.
• A medida de velocidade deve ser estruturada a partir de dois la¸cos indutivos, em uma distˆ
ancia previamente conhecida.
• O circuito microcontrolado deve capturar estas variabilidades de frequˆencia
e assim chavear o disparo da contagem de tempo referente `a passagem pelo
primeiro la¸co at´e o segundo.
3
3
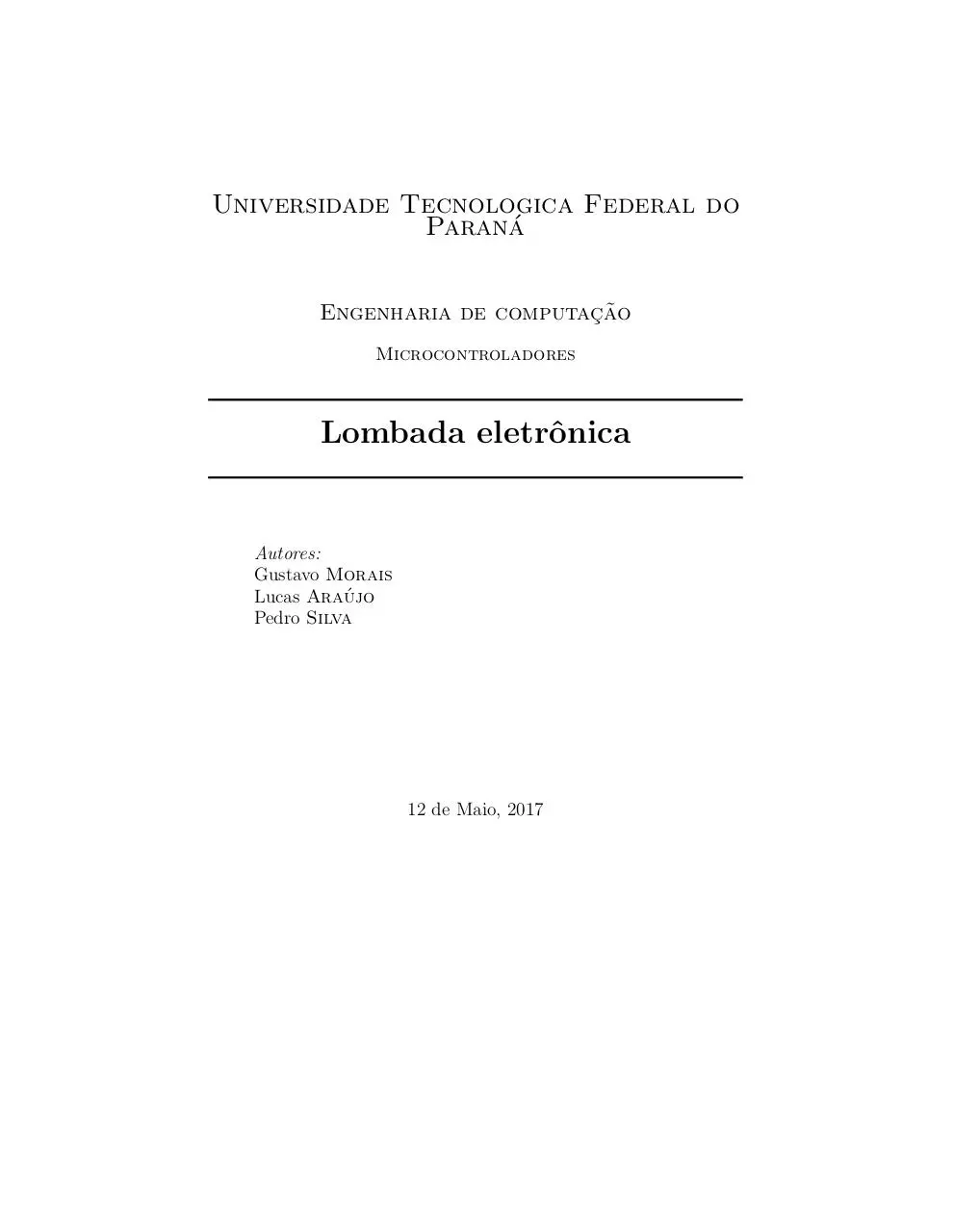
Oscilador Colpitts
O circuito do oscilador utilizado no projeto ´e foi um Colpitts pois atendia os
requisitos e o professor orientador possuia familiaridade. Em primeira instˆancia
projetaram-se dois Colpitts, o primeiro para detectar a entrada do prot´otipo e
o segundo a sa´ıda, contudo percebeu-se que seria mais coveniente os posicionar
em s´erie e utilizar somente dois indutores. O circuito montado encontra-se na
figura 3.
Figure 3: Circuito Colpitts
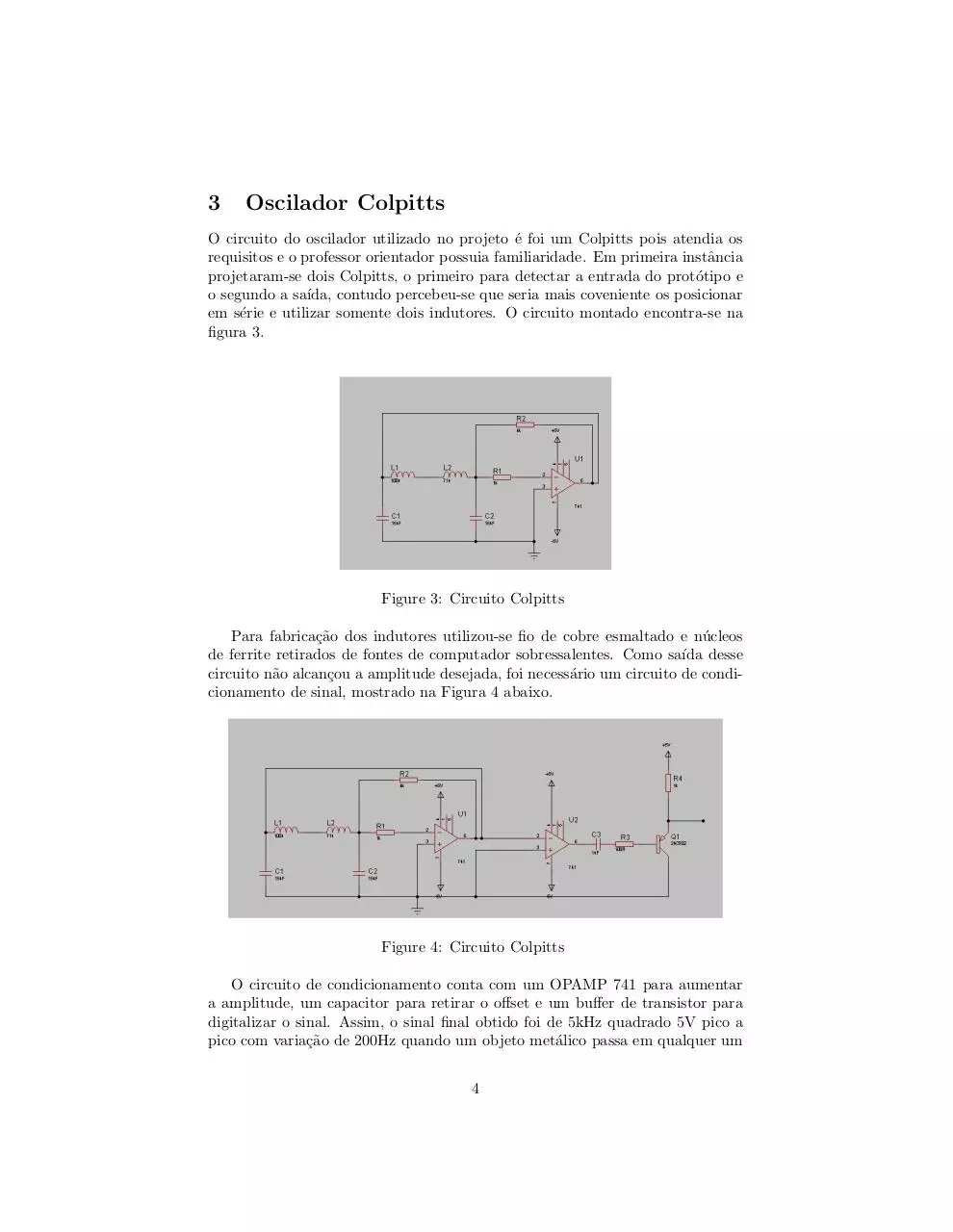
Para fabrica¸c˜
ao dos indutores utilizou-se fio de cobre esmaltado e n´
ucleos
de ferrite retirados de fontes de computador sobressalentes. Como sa´ıda desse
circuito n˜
ao alcan¸cou a amplitude desejada, foi necess´ario um circuito de condicionamento de sinal, mostrado na Figura 4 abaixo.
Figure 4: Circuito Colpitts
O circuito de condicionamento conta com um OPAMP 741 para aumentar
a amplitude, um capacitor para retirar o offset e um buffer de transistor para
digitalizar o sinal. Assim, o sinal final obtido foi de 5kHz quadrado 5V pico a
pico com varia¸c˜
ao de 200Hz quando um objeto met´alico passa em qualquer um
4
dos dois indutores, o que ´e o suficiente para identifica¸c˜ao com a varredura feito
pelo microcontrolador.
4
Varredura da frequˆ
encia no 8051
Como j´
a dito, foi feito um Collpits com dois indutores produzidos pela equipe,
e a sa´ıda desse circuito foi ligada na interrup¸c˜ao externa 0 do microcontrolador
8051.
4.1
Rotina de inicializa¸c˜
ao
Essa rotina ´e a respons´
avel por reiniciar/iniciar a captura de frequˆencia, ela
zera todos registradores, e habilita a interrup¸c˜ao externa 0, e configura essa
para funcionar por borda de decida.
4.2
Detec¸c˜
ao da frequˆ
encia
A sa´ıda do Collpits ´e uma onda de 5 volts pico `a pico, sendo assim a cada per´ıodo
ocorre uma interrup¸c˜
ao, e nesse momento a rotina de detec¸c˜ao de frequˆencia
ocorre.
Tentando deixar o mais simples poss´ıvel, quando essa rotina e chamada pela
primeira vez, ela iniciar um timer(Timer 0 do 8051), quando ´e chamada pela
segunda vez ´e salvo o valor como tempo padr˜ao entre duas interrup¸c˜oes. Todas
as outras interrup¸c˜
oes s˜
ao simplesmente compara¸c˜oes com esse valor salvo.
Foi necess´
ario gerar um valor de sensibilidade para essa compara¸c˜ao, uma vez
que o Collpits n˜
ao gera uma onda perfeita, pode haver uma pequena varia¸c˜ao
entre os valores, mesmo que n˜ao tenha passado nenhum objeto met´alico em
cima da bobina. Esse valor de sensibilidade foi calibrado de acordo com testes
feitos no oscilador em quest˜
ao.
Ap´
os a detec¸c˜
ao de varia¸c˜ao de frequˆencia, a rotina inicia outro timer(Timer
1 do 8051) e inicia o processo de detec¸c˜ao de varia¸c˜ao de frequˆencia novamente.
Quando detectada uma segunda varia¸c˜ao na frequˆencia, ´e convertido o valor
do timer 1 de forma `
a ficar coerente com o tempo, e ent˜ao ´e carregado os valores
para os registradores necess´
arios e a rotina Check Speed ´e chamada, essa ser´a
descrita na pr´
oxima sess˜
ao.
5
Impress˜
ao da Velocidade e Alerta
Como j´
a dito, utilizaram-se displays de sete segmentos para mostrar a velocidade, em espec´ıfico utilizaram-se displays ˆanodo comum.
O funcionamento deles se d´a de forma simples, funcionam como sete LEDs
isolados que precisam ser polarizados. Em outras palavras, o microcontrolador
liga o segmento correspondente ao jogar n´ıvel LOW no bit correspondente.
5
ˆ
Figure 5: Display de Sete Segmentos Anodo
comum
5.1
Multiplexa¸c˜
ao
Na pr´
atica realizada, foi necess´ario multiplexar os displays para redu¸c˜ao do
n´
umero de portas utilizadas, para isto chaveou-se a alimenta¸c˜ao displays de
acordo com o circuito da figura 6.
Figure 6: Circuito para multiplexa¸c˜ao
Assim, dois bits foram associados ao microcontrolador para controle de
quando os displays estavam ligados e desligados. Desta forma, utilizou-se o
mesmo barramento para fornecimento do n´
umero a ser mostrado somente ativando o display correspondente a cada momento.
6
5.2
Rotinas desenvolvidas
• Definitions
printPort equ P1
regTable equ R0
nPrint equ R2
memTable equ 200
displayX equ P2.7
displayY equ P2.6
Estas foram as defini¸co˜es utilizadas para facilitar a programa¸c˜ao das rotinas.
• loadNumbers
Carrega todos os bytes correspondentes aos n´
umeros no display de segmentos em uma posi¸c˜ao de mem´oria determinada por uma defini¸c˜ao,
memTable, como j´
a mostrado.
• configTimersToDisplay
Inicializa as interrup¸c˜oes gerais e especificas e configura o timer a ser
utilizado na multiplexa¸c˜ao.
• timer0Rotina
Rotina do timer0, a qual ficar´a chamando as rotinas que escrever˜ao nos
displays sempre que a interrup¸c˜ao do timer for ativada.
• writeNumber
Escreve na printPort, na porta associada aos displays, o byte correspondente ao n´
umero carregado em R7.
• printUnidade
Escreve o n´
umero carregado em R7 no display das unidades, faz uso de
writeNumber.
• printDezena
Escreve o n´
umero carregado em R7 no display das dezenas, faz uso de
writeNumber.
• write2Displays
Rotina que escreve um n´
umero de 0 a 99 nos dois displays, faz uso de
printDezena e printUnidade.
7
• checkSpeed
Rotina que recebe a distˆancia do percurso e o tempo e ent˜ao calcula a
velocidade e chama write2Displays, al´em de ligar o buzzer/led caso a velocidade calculada ultrapasse 40km/h.
Escreve o n´
umero carregado em R7 no display das dezenas.
5.3
Buzzer
Determinou-se um limite de velocidade de 40km/h, o qual ao ser ultrapassado
ativava um LED e um Buzzer, o circuito correspondente se encontra na figura 7
Figure 7: Circuito para ativa¸c˜ao do buzzer
O circuito para ativa¸c˜
ao ´e bem simples e ´e ligado ao se jogar n´ıvel baixo na
porta P0.0 do microcontrolador.
A verifica¸c˜
ao e ativa¸c˜
ao desse pino ´e feita pela rotina checkSpeed com uma
simples subtra¸c˜
ao da velocidade por 40, e depois checando-se o n´ıvel da flag
Carry.
6
Conclus˜
ao
Em um aspecto geral o projeto foi realizada com sucesso. O oscilador Colpitts
foi montado com sucesso. A varredura feita na porta de interrup¸c˜oes foi capaz
de identificar as varia¸c˜
oes de frequˆencia causadas pela passagem do carrinho
acoplado com a barra de metal. O circuito e c´odigo em assembly foi capaz de
mostrar velocidades de 0 a 99 nos dois displays de sete segmentos.
Dois pontos representaram o maior gasto de tempo da equipe, o projeto do
Colpitts e seu isolamento do 8051 para que as portas n˜ao causassem inteferˆencia
na oscila¸c˜
ao. Contudo, ainda mais o ajuste de sensibilidade da detec¸c˜ao das
varia¸c˜
oes na oscila¸c˜
ao, pois esta se dava na ordem de 200Hz, e os ru´ıdos presentes
nos mais diversos instrumentos utilizados causavam m´a detec¸c˜ao algumas vezes.
8
Download Radar Eletronico
Radar Eletronico.pdf (PDF, 592.97 KB)
Download PDF
Share this file on social networks
Link to this page
Permanent link
Use the permanent link to the download page to share your document on Facebook, Twitter, LinkedIn, or directly with a contact by e-Mail, Messenger, Whatsapp, Line..
Short link
Use the short link to share your document on Twitter or by text message (SMS)
HTML Code
Copy the following HTML code to share your document on a Website or Blog
QR Code to this page

This file has been shared publicly by a user of PDF Archive.
Document ID: 0000597334.