Stage Interactions Robot IHM UCL (PDF)
File information
Title: Stage_Interactions_Robot_IHM_UCL
Author: sapin
This PDF 1.4 document has been generated by PDFCreator Version 0.9.9 / GPL Ghostscript 8.70, and has been sent on pdf-archive.com on 22/10/2013 at 13:50, from IP address 130.104.x.x.
The current document download page has been viewed 549 times.
File size: 172.72 KB (2 pages).
Privacy: public file

File preview
iMMC
Institut de Mécanique, Matériaux et génie Civil
U C L Université catholique de Louvain
MCTR
Pôle de MéCaTRonique
Haute école de Namur-Liège-Luxembourg
Rue Saint-Donat 130
5002 Namur
Louvain-la-Neuve, le 20 octobre 2013
A qui de droit,
Concerne : Stage « Interactions Robots IHM »
La problématique du stage se place dans le cadre du développement de produits et services
d'assistance à la rééducation du membre supérieur.
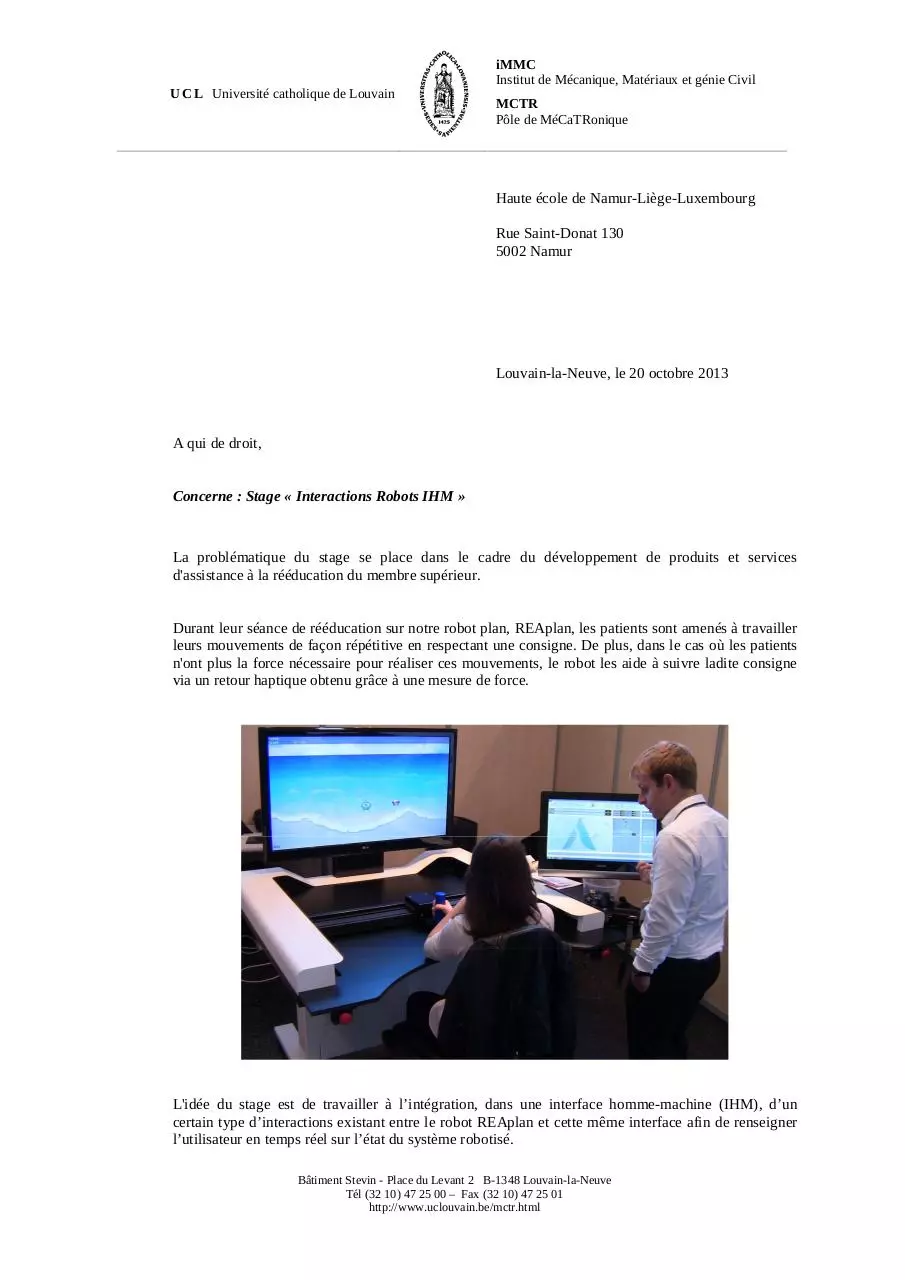
Durant leur séance de rééducation sur notre robot plan, REAplan, les patients sont amenés à travailler
leurs mouvements de façon répétitive en respectant une consigne. De plus, dans le cas où les patients
n'ont plus la force nécessaire pour réaliser ces mouvements, le robot les aide à suivre ladite consigne
via un retour haptique obtenu grâce à une mesure de force.
L'idée du stage est de travailler à l’intégration, dans une interface homme-machine (IHM), d’un
certain type d’interactions existant entre le robot REAplan et cette même interface afin de renseigner
l’utilisateur en temps réel sur l’état du système robotisé.
Bâtiment Stevin - Place du Levant 2 B-1348 Louvain-la-Neuve
Tél (32 10) 47 25 00 – Fax (32 10) 47 25 01
http://www.uclouvain.be/mctr.html
iMMC
Institut de Mécanique, Matériaux et génie Civil
U C L Université catholique de Louvain
MCTR
Pôle de MéCaTRonique
Dans le cas qui nous occupe, derrière le mot « interaction » se trouve en fait la gestion (i) des erreurs
provenant de l’embarqué aussi bien au niveau hardware que software et (ii) des exceptions générées
par l’IHM.
Plus concrètement, nous voulons faire remonter ces erreurs jusqu’à l’interface et les traiter en ayant
une réaction appropriée en fonction de leur nature.
Il sera également demandé au stagiaire de mettre en place un système de plugins afin de permettre
l’apport de nouvelles fonctionnalités à l’application ainsi qu’une série de tests unitaires permettant de
vérifier le bon fonctionnement des portions sensibles du programme.
Je vous remercie pour la bonne suite,
Dr Ir Julien Sapin
Research engineer –julien.sapin@uclouvain.be
Spin-off AXINESIS
iMMC/CEREM
UCLouvain –www.uclouvain.be
Phone: +32 10 47 25 12
Fax: +32 10 47 25 01
Place du Levant 2
Stevin building - b-139
B-1348 Louvain-la-Neuve (Belgique)
Bâtiment Stevin - Place du Levant 2 B-1348 Louvain-la-Neuve
Tél (32 10) 47 25 00 – Fax (32 10) 47 25 01
http://www.uclouvain.be/mctr.html
Download Stage Interactions Robot IHM UCL
Stage_Interactions_Robot_IHM_UCL.pdf (PDF, 172.72 KB)
Download PDF
Share this file on social networks
Link to this page
Permanent link
Use the permanent link to the download page to share your document on Facebook, Twitter, LinkedIn, or directly with a contact by e-Mail, Messenger, Whatsapp, Line..
Short link
Use the short link to share your document on Twitter or by text message (SMS)
HTML Code
Copy the following HTML code to share your document on a Website or Blog
QR Code to this page
This file has been shared publicly by a user of PDF Archive.
Document ID: 0000129856.