Truong14sight (PDF)
File information
This PDF 1.4 document has been generated by LaTeX with hyperref package / pdfTeX-1.40.14, and has been sent on pdf-archive.com on 29/11/2015 at 22:57, from IP address 24.18.x.x.
The current document download page has been viewed 452 times.
File size: 1.82 MB (4 pages).
Privacy: public file



File preview
Teaching English in Rural Africa
through Conversational Robotic Agents
KimYen Truong, Akiva Notkin and Maya Cakmak (PI)
I. INTRODUCTION
The goal of this project is to develop conversational
robotic agents that can carry out foreign language lessons
autonomously or with partial human supervision, for individuals or small groups. Although such robots could be used
for teaching any language to any age group anywhere in the
world, this project focuses on teaching English to children
in countries where access to English-language education is
limited, as part of their primary education (K-6). We are
motivated by recent results demonstrating the effectiveness
of robotic instruction in comparison to other electronic media
[12], [14], [9], [16] and the recent increase in the availability of reliable, low-cost robotic platforms. Our project
will explore several frameworks that allow English teachers
around the globe to remotely program, generate content
for, and control an instructional robot to deliver language
lessons. We will leverage our relationship with a non-profit
Moroccan foundation that builds schools across Africa, to
deploy our system and test different frameworks developed
as part of this project. Our project will impact children in
these schools by facilitating English learning supervised by
qualified teachers, and consequently giving them access to
the world’s largest information resources for self-education.
II. PROBLEM DESCRIPTION
English is one of the most common languages in the world
(both as native and secondary language) and it is arguably
the most useful language to know. Speaking English means
access to abundant information resources, including a large
majority of all online content [26], published scientific papers
[25], and other educational resources, such as Massively
Open Online Courses (MOOCs) [5]. In many countries
English is the main second language (L2) taught in public
schools as early as in kindergarten, particularly in countries
that have been colonized by the British Empire in the
last century [10]. However, in some developing countries,
English has not widely spread as part of public education
curricula. For instance, most African countries have typically
taught French as L2. This has limited the flux of students from these countries to English-speaking international
academic institutions and isolated African institutes from
the larger research community. The schools that wish to
offer English as a second language in these countries, often
have difficulty finding qualified English teachers due to this
historical bias and have difficulty attracting foreign teachers
due to political instability or limited resources.
The authors are with the Computer Science and Engineering Department,
University of Washington, Seattle, WA 98195, USA.
(a)
(b)
Jibo
developer
Kubi
edition that
$399
+ be used
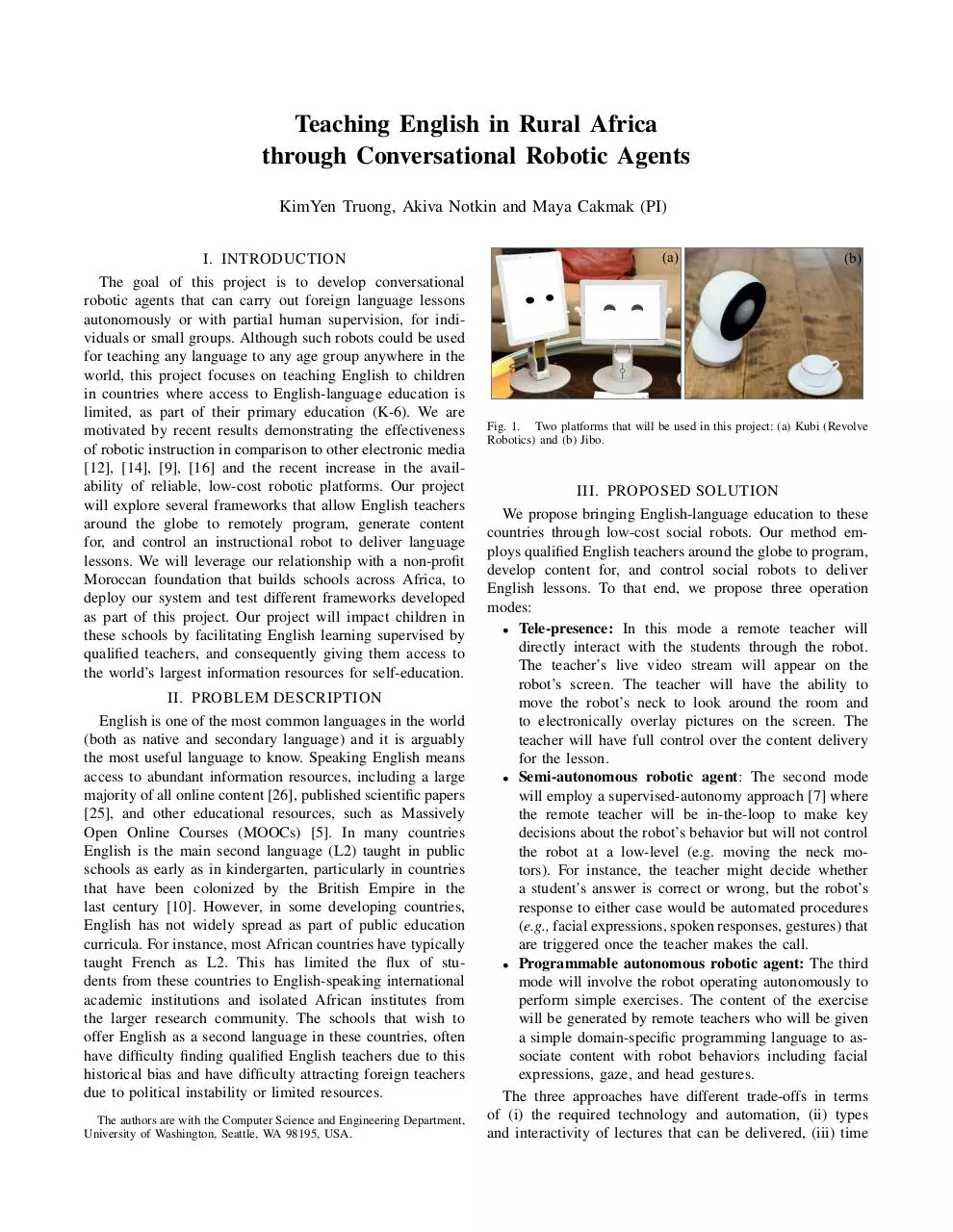
Fig.
1. hacker
Two platforms
will
in this
project: edition
(a) Kubi ($599)
(Revolve
Robotics)
(b) Jibo.
Google and
Nexus
7 tablet $229.00
III. PROPOSED SOLUTION
We propose bringing English-language education to these
countries through low-cost social robots. Our method employs qualified English teachers around the globe to program,
develop content for, and control social robots to deliver
English lessons. To that end, we propose three operation
modes:
• Tele-presence: In this mode a remote teacher will
directly interact with the students through the robot.
The teacher’s live video stream will appear on the
robot’s screen. The teacher will have the ability to
move the robot’s neck to look around the room and
to electronically overlay pictures on the screen. The
teacher will have full control over the content delivery
for the lesson.
• Semi-autonomous robotic agent: The second mode
will employ a supervised-autonomy approach [7] where
the remote teacher will be in-the-loop to make key
decisions about the robot’s behavior but will not control
the robot at a low-level (e.g. moving the neck motors). For instance, the teacher might decide whether
a student’s answer is correct or wrong, but the robot’s
response to either case would be automated procedures
(e.g., facial expressions, spoken responses, gestures) that
are triggered once the teacher makes the call.
• Programmable autonomous robotic agent: The third
mode will involve the robot operating autonomously to
perform simple exercises. The content of the exercise
will be generated by remote teachers who will be given
a simple domain-specific programming language to associate content with robot behaviors including facial
expressions, gaze, and head gestures.
The three approaches have different trade-offs in terms
of (i) the required technology and automation, (ii) types
and interactivity of lectures that can be delivered, (iii) time
involvement and workload on the remote teacher, and (iv)
availability of a stable high-bandwidth internet connection.
Telepresence is currently possible and does not require development of new technologies or new system integration.
It allows for very flexible lesson content but it requires
constant involvement of the teacher and imposes a high
mental load. A semi-autonomous system requires the design
of interpretable and engaging robotic behaviors, but handles
difficult algorithmic problems using human computation.
Although it still requires the teacher to be present, the
mental load might be reduced. The content of lectures is still
flexible but is subject to the constraint of the robotic agent
being able deliver it. Finally, the autonomous system requires
automation of the instructional interaction which has many
open challenges. Nonetheless, we can attain autonomous
interactions that involve simple exercises through the integration of existing face detection, tracking, and recognition,
speech recognition, dialog management, animation, and robot
control technologies. While the lesson content and style is
less flexible for these systems, they allow for efficient use
of labor—remote English teachers can create lesson content
once and the same content can be delivered by multiple
robots in different schools.
A. Platform
We will implement our methods on two low-cost platforms
(Fig. 1). The first is a Kubi [4] a pan-tilt neck that holds
a tablet head. The Kubi Hacker’s edition costs $399 and
the Nexus Tablet for controlling it costs $229. This set up
has been used by our team as part of preliminary work on
developing interactive behaviors for conversational agents.
The alternative platform is Jibo [3], a kick-starter product
with a pan-tilt head containing a round LCD display, a
camera, microphone, and speakers. The developer edition
of Jibo costs $599. Our team has pre-ordered a Jibo which
will be delivered in the Summer 2015. The two platforms
are comparable in price and functionalities. Both platforms
are programmable and can be used for telepresence. Our
methods will be transferrable between the two platforms.
B. Lesson content
The language lessons for our system will be at a beginner
level and will be based on Duolingo [2], a free language
learning platform that employs bilinguals around the world
to contribute content to new lessons. We will use Duolingo’s
French-to-English lessons. To minimize dependence on the
children’s prior knowledge of French, we will leverage the
additional communication channels afforded by our robotic
platform including facial expressions on the graphical display, head gestures, and gaze, which can be directed towards
different students or objects of interest in the instructional
environment.
C. Context
Based on the size of the considered platforms we will
initially target smaller groups of children, up to 5 at a time.
The lessons will involve the children sitting in a circle around
Fig. 2.
[27].
(a)
(b)
(c)
(d)
(e)
(f)
Examples of other robots used in education [16], [12], [19], [14],
the robot. The lessons will be supervised by a local teacher
or school staff who has been trained on how to start the
system and get it ready for a lecture. This person will also
be in charge of guiding the children to sit around the robot
in an optimal formation for the system to work properly.
IV. RELATED WORK
Our work is motivated by recent studies within the humanrobot interaction community, demonstrating the effectiveness
of robotic instruction. Leyzberg et al. compared the three
course content delivery mediums in large-scale study with
100 participants: (i) a physical robot, (ii) a video representation of the same robot, and (iii) a disembodied voice [16].
They found that participants who received lessons from the
physically-present lesson outperformed the participants in
the other two conditions in learning to solve a particular
type of problem. Their follow-up work demonstrated further
learning gains with personalization of content to the particular students [17]. Corrigan et al. studied the automatic
detection of student engagement so as to personalize pace
and content to the individual students [9]. In a study involving tele-operated mobile robots administering English
lessons in a Korean classroom, Lee et al. demonstrated that
robot-assisted language learning significantly increased the
students’ satisfaction, interest, confidence, and motivation
[14], [13]. Kanda et al. performed an 18-day field trial with
an English speaking robot in a Japanese elementary school,
highlighting the potential drop in the novelty effect of a
robot that is constantly on, but nonetheless demonstrating
vocabulary learning outcomes for students who had sustained interactions with the robot [12]. Tanaka and Matsuzoe
demonstrated that a peer robot (rather than a teacher robot)
might be more effective in promoting learning [23].
Researchers have also started to explore the idea of using
tele-presence in education, some with a particular focus on
language learning. For instance, Tanaka and Noda explored
the idea of connecting two classrooms between Japan and
the US [24]. Yun et al. developed a tele-education platform
[28] and investigated the design of easy to use interfaces
for teachers to remotely control such robots [27]. Others
have looked into the use of telepresence robots by children
to participate in a classroom while they are hospitalized or
during bed rest [22].
Although we do not present a comprehensive survey in this
document, several other lines of research are also relevant for
our work, including (i) intelligent tutoring systems [8], (ii)
second language acquisition (SLA) [18], and (iii) computer
assisted language learning [15]. Our work is informed by
findings revealed and methods developed within these fields.
In addition, other areas within human-robot interaction, including gaze [20], human-robot dialog management [6], and
facial expression animation [21] have important implications
that inform the design of our system.
A. Expected contributions
Previous work presents examples of systems resembling
the one proposed in this project and motivate the use of
robots for the problem addressed (Sec. II). Nonetheless,
researchers in this area acknowledge that they have only
scratched the surface of a problem with many challenges
and great potential for impact [11], [13]. Our work will
push the envelope in the use of low-cost robots, compared to
robots that have previously been used in similar contexts (all
above a $2K price point). Rather than a short-term trial as
in some of the previous work, we will aim for a permanent
deployment with multiple generations of students over the
years, yielding new types of empirical data. Finally, our
work will result in a new framework for using alternative
techniques with different levels of autonomy (Sec. III) in a
complementary fashion, to optimize for student learning and
efficient use of the remote teacher’s time and effort.
V. PROPOSED ACTIVITIES
Our implementation will leverage preliminary work on
the development of a conversational agent using the Kubi
platform. This includes existing routines for facial expressions and animations, head gestures, face tracking, open
ended speech dictation, and text to speech. The main development activities in the proposed project include (i)
the implementation of the teachers’ user interfaces for the
telepresence and semi-autonomous modes, and (ii) the design
and implementation of the simple programming language to
allow scripting of autonomous delivery of lessons. We will
also transfer our implementations to the Jibo platform and
improve the generalizability of our implementation as part
of this process.
Before deployment we will test our system in two ways.
We will evaluate the robustness of our system within microinteractions through in-lab studies by recruiting studentteacher pairs. The content of these interactions will be staged
to ensure diversity of test cases. Next, we will do a short-term
mock deployment of our system as part of an elementary
school summer program at our institution involving a Frenchlanguage learning session with the robot over the course of
two weeks. The content for this evaluation will be based
on DuoLingo’s English-to-French lessons, which are very
similar to the French-to-English ones. The teacher during
these tests will be one of our team members.
For the actual deployment of our system we will partner with the Benjelloun-Mezian Foundation [1] based in
Casablanca, Morocco and led by BMCE bank chairman
Mr. Othman Benjelloun and his wife Dr. Leila MezianBenjelloun. The foundation dedicates a large portion of its
philanthropy activities to the promotion of education at all
levels, both in Morocco and the rest of Africa. It has built
a number of elementary schools in rural parts of Morocco
and it provides scholarships to Moroccan students for higher
education in international institutions. The PI’s relationship
with the foundation is a result of the Benjellouns’ fascination
with robots. In the Summer of 2013, during the PI’s postdoctoral research at Willow Garage, Inc., Mr. Benjelloun
purchased a PR2 robot made by the company for the headquarters of his bank in Casablanca. The PI was part of the
team that travelled to Morocco to deploy this robot. The
problem addressed in this proposal, as well as the idea for
a robotics-based solution, was in fact given to the PI by
Dr. Mezian-Benjelloun who had read about similar systems
that were developed and deployed in Japan and Korea [12],
[28], [14]. The PI has maintained a connection with the
family afterwards and has recently deployed another PR2
robot in their son’s US home. Hence, in this project, we
plan to do our first deployment in one of the schools built
by the foundation and will rely on the family’s support and
influence to facilitate the deployment.
The teacher for the deployed system will initially be one
of our team members but over time we will work to recruit
volunteers from our local community. We hope to leverage
other partnerships and collaborations across the University
of Washington campus, including the UW language learning
center, the UW center for game science and the UW Change
and ICTD (Information and Computing Technology for the
Developing World) groups.
A. Timeline
We plan to complete our implementation by the beginning
of Summer 2015, carry out the robustness tests and the mock
deployment during the Summer of 2015 and implement any
necessary revisions based on these tests, and perform the
final deployment in Morocco in October 2015.
B. Budget
We ask for a total of $2000 support for the purchase of
the platform that will be deployed in Morocco (Kubi: $399
+$229 or Jibo: $599) and to cover travel expenses for one
team member to go to Morocco for the deployment and
training of the staff (approximately $1100 for the flight and
$300 for accommodations).
C. Project team
Our team has three members: (i) an undergraduate student who is taking the lead in performing the proposed
research as part of her honors thesis at the University of
Washington, (ii) a high-school intern who is helping with the
implementation of our system, and (iii) an assistant professor
(PI) supervising the project. The PI has extensive experience
developing robust interactive robots and conducting humanrobot interaction experiments, and she has had several realworld, one-of-a-kind robot deployment experiences. Short
biographies of team members are given below.
KimYen Truong is a senior undergraduate in Computer
Science & Engineering at the University of Washington. Her
research interests are in socially assistive robotics. She has
been working at Dr. Cakmak’s lab for six months on designing interactions for a tablet-based table-top conversational
robot with the Kubi platform. http://kimyen.org/
Akiva Notkin is a junior at Ingraham High School in Seattle,
Washington. His research interests are at the intersection
of human perception and artificial intelligence. He is an
experienced Java and Android device programmer and he
spent the summer of 2014 interning at Dr. Cakmak’s lab
working on facial expressions for a tablet-based table-top
robot.
Maya Cakmak is an Assistant Professor at the University of
Washington, Computer Science & Engineering Department,
where she directs the Human-Centered Robotics lab. She
received her PhD in Robotics from the Georgia Institute
of Technology in 2012, after which she spent a year as a
post-doctoral research fellow at Willow Garage—one of the
most influential robotics companies in he world. Her research
interests are in human-robot interaction, end-user programming and assistive robotics. Her work aims to develop robots
that can be programmed and controlled by a diverse group
of users with unique needs and preferences, to do useful
tasks. Her work has been published at major Robotics and
AI conferences and journals, demonstrated live in various
venues and has been featured in numerous media outlets.
http://www.mayacakmak.com
http://hcrlab.cs.washington.edu
R EFERENCES
[1] Bringing schools and community development to rural morocco:
http://www.synergos.org/globalgivingmatters/
features/0403medersat.htm.
[2] Duolingo: www.duolingo.com/.
[3] Jibo: http://www.myjibo.com/.
[4] Kubi, revolve robotics: https://revolverobotics.com/.
[5] The global directory of moocs providers: http://www.moocs.
co/, November 2012.
[6] Dan Bohus and Eric Horvitz. Facilitating multiparty dialog with
gaze, gesture, and speech. In International Conference on Multimodal
Interfaces and the Workshop on Machine Learning for Multimodal
Interaction, page 5. ACM, 2010.
[7] Gordon Cheng and Alexander Zelinsky. Supervised autonomy:
A framework for human-robot systems development. Autonomous
Robots, 10(3):251–266, 2001.
[8] Albert T Corbett, Kenneth R Koedinger, and John R Anderson. Intelligent tutoring systems. Handbook of human-computer interaction,
pages 849–874, 1997.
[9] Lee J Corrigan, Christopher Peters, and Ginevra Castellano. Identifying task engagement: Towards personalised interactions with educational robots. In Affective Computing and Intelligent Interaction
(ACII), 2013 Humaine Association Conference on, pages 655–658.
IEEE, 2013.
[10] Education First. English proficiency index: http://www.ef.com/
epi, 2011.
[11] Jeonghye Han. Emerging technologies:robot assisted language learning. Language and Learning Technology, 16(3):1–9, 2012.
[12] Takayuki Kanda, Takayuki Hirano, Daniel Eaton, and Hiroshi Ishiguro.
Interactive robots as social partners and peer tutors for children: A field
trial. Human-computer interaction, 19(1):61–84, 2004.
[13] Sungjin Lee, Hyungjong Noh, Jonghoon Lee, Kyusong Lee, and
Gary Geunbae Lee. Cognitive effects of robot-assisted language
learning on oral skills. In INTERSPEECH 2010 Satellite Workshop
on Second Language Studies: Acquisition, Learning, Education and
Technology, 2010.
[14] Sungjin Lee, Hyungjong Noh, Jonghoon Lee, Kyusong Lee, Gary Geunbae Lee, Seongdae Sagong, and Munsang Kim. On the effectiveness
of robot-assisted language learning. ReCALL, 23(01):25–58, 2011.
[15] Michael Levy. Computer-Assisted Language Learning: Context and
Conceptualization. ERIC, 1997.
[16] D Leyzberg, S Spaulding, M Toneva, and B Scassellati. The physical
presence of a robot tutor increases cognitive learning gains. In
Proceedings of the 34th Annual Conference of the Cognitive Science
Society. Austin, TX: Cognitive Science Society, 2012.
[17] Daniel Leyzberg, Samuel Spaulding, and Brian Scassellati. Personalizing robot tutors to individuals’ learning differences. In Proceedings
of the 2014 ACM/IEEE international conference on Human-robot
interaction, pages 423–430. ACM, 2014.
[18] A-M Masgoret and Robert C Gardner. Attitudes, motivation, and
second language learning: a meta–analysis of studies conducted by
gardner and associates. Language learning, 53(1):123–163, 2003.
[19] Javier R Movellan, Fumihide Tanaka, Bret Fortenberry, and Kazuki
Aisaka. The rubi/qrio project: origins, principles, and first steps. In
Development and Learning, 2005. Proceedings. The 4th International
Conference on, pages 80–86. IEEE, 2005.
[20] Bilge Mutlu, Jodi Forlizzi, and Jessica Hodgins. A storytelling robot:
Modeling and evaluation of human-like gaze behavior. In Humanoid
Robots, 2006 6th IEEE-RAS International Conference on, pages 518–
523. IEEE, 2006.
[21] Tiago Ribeiro and Ana Paiva. The illusion of robotic life: principles
and practices of animation for robots. In Proceedings of the seventh
annual ACM/IEEE international conference on Human-Robot Interaction, pages 383–390. ACM, 2012.
[22] Kieron Sheehy and Ashley A Green. Beaming children where they
cannot go: telepresence robots and inclusive education: an exploratory
study. Ubiquitous Learning: an international journal, 3(1):135–146,
2011.
[23] Fumihide Tanaka and Shizuko Matsuzoe. Children teach a carereceiving robot to promote their learning: Field experiments in a classroom for vocabulary learning. Journal of Human-Robot Interaction,
1(1), 2012.
[24] Fumihide Tanaka and Tomoyuki Noda. Telerobotics connecting
classrooms between japan and us: a project overview. In RO-MAN,
2010 IEEE, pages 177–178. IEEE, 2010.
[25] Daphne
van
Weijen.
The
language
of
(future)
scientific
communication:
http://www.
researchtrends.com/issue-31-november-2012/
the-language-of-future-scientific-communication/,
2012.
[26] W3Techs.com.
Usage of content languages for websites:
http://www.synergos.org/globalgivingmatters/
features/0403medersat.htm, December 2011.
[27] Sang-Seok Yun, Munsang Kim, and Mun-Taek Choi. Easy interface
and control of tele-education robots. International Journal of Social
Robotics, 5(3):335–343, 2013.
[28] Sangseok Yun, Jongju Shin, Daijin Kim, Chang Gu Kim, Munsang
Kim, and Mun-Taek Choi. Engkey: tele-education robot. In Social
Robotics, pages 142–152. Springer, 2011.
Download Truong14sight
Truong14sight.pdf (PDF, 1.82 MB)
Download PDF
Share this file on social networks
Link to this page
Permanent link
Use the permanent link to the download page to share your document on Facebook, Twitter, LinkedIn, or directly with a contact by e-Mail, Messenger, Whatsapp, Line..
Short link
Use the short link to share your document on Twitter or by text message (SMS)
HTML Code
Copy the following HTML code to share your document on a Website or Blog
QR Code to this page

This file has been shared publicly by a user of PDF Archive.
Document ID: 0000318093.