Web presentation (PDF)
File information
Title: FileNewTemplate
Author: Diana
This PDF 1.5 document has been generated by Microsoft® PowerPoint® 2013, and has been sent on pdf-archive.com on 13/10/2016 at 23:13, from IP address 4.35.x.x.
The current document download page has been viewed 373 times.
File size: 1.25 MB (14 pages).
Privacy: public file




File preview
Tashi’s Academic Projects
Sensors and Data - UConn Capstone Project
For Web Viewing
04/06/2016
1
Intro for Web Viewers
Hello!
Thanks for taking a moment to check out this short Powerpoint. In it I cover a
few projects that I have worked on during my academic career.
The first project that I cover is a lab assignment that I carried out during my
sophomore year at the University of Connecticut
The second project is my Capstone project from my senior year. The intent of
this web presentation is to give a brief overview of some of the things I have
worked on and where my interests lie.
Thanks for viewing! I am looking forward to giving this presentation to you in
person.
2
Sensors and Data
Piezoelectric Actuator Lab
•
•
•
•
•
Used a motor with a fine travel
range of 25 micrometers
Inputted 5 V signal at 5hz
Measured movement with Linear
Variable Displacement Transducer
(LVDT) and National Instruments
LabView
Used filters to account for noise
Looked for 5hz signal in LabView
3
Sensors and Data
Results
•
•
Focus was on windowing and
signal processing
Used Fourier Transform to find
constituent frequencies of
measured signal
•
•
Various waveforms
Various sampling frequencies
4
Other Piezoelectric Applications
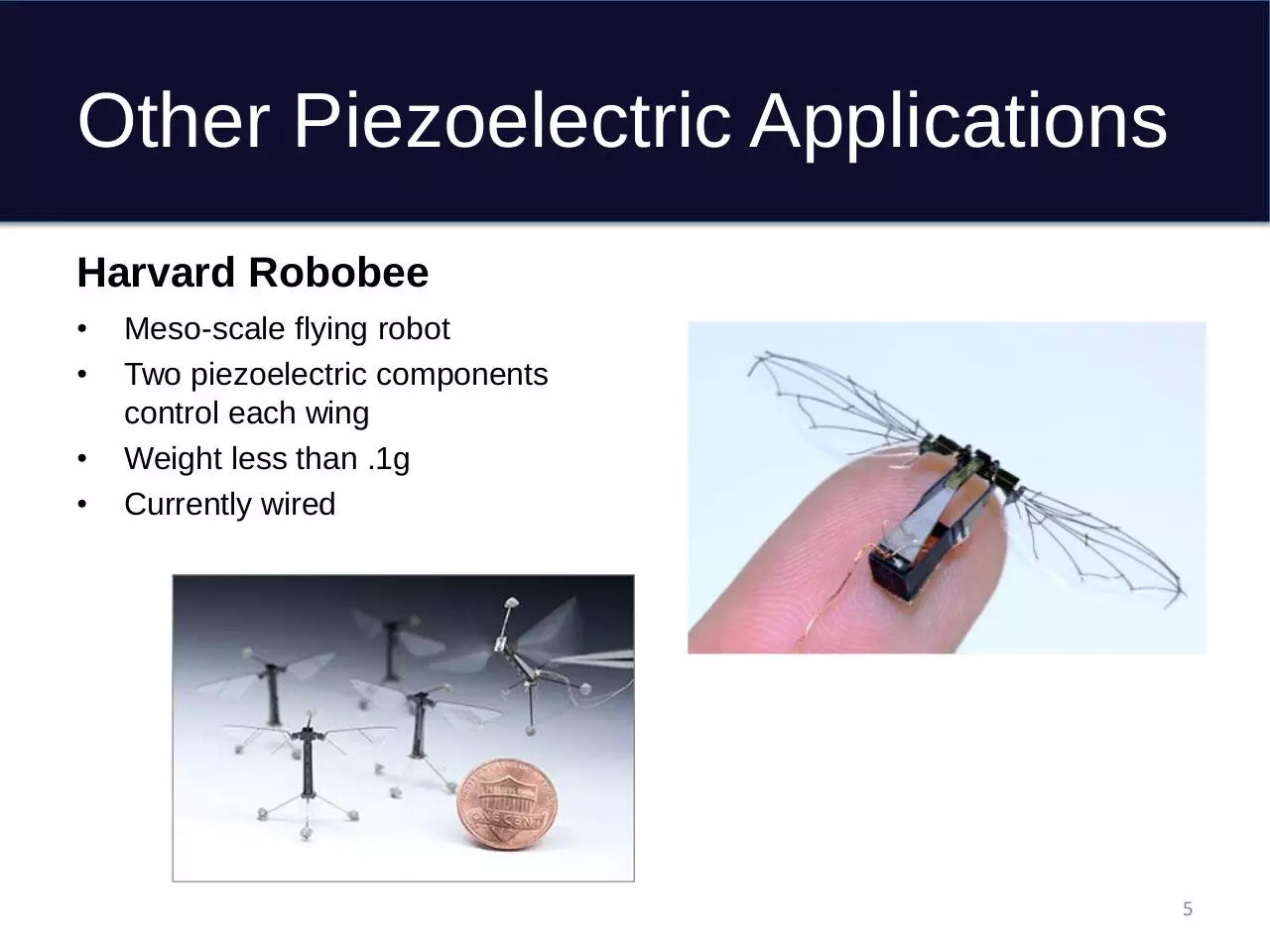
Harvard Robobee
•
•
•
•
Meso-scale flying robot
Two piezoelectric components
control each wing
Weight less than .1g
Currently wired
5
UConn Senior Design
Overview
•
•
•
•
Year-long design project
Corporate Sponsor
gives “donation” of
~$10,000
Teams of students work
to solve industry
problems
Projects are displayed
at UConn School of
Engineering
“Demonstration Day”
6
Automation of a Taping Process
•
•
•
•
•
Goal was to automate the
application of masking tape
Masked parts to be plated
(chrome, anodized, acid-etching)
MRO process – variable part
geometry
Machine has to accept range of
part sizes
Successful outcome
7
Picture of Final Product – ‘Lathe’
Style Automated Machine
Logic Control
Module
Drive Motor
Power Distribution
Module
Adjustable End
Plate
8
Systems - Moveable End Plate
•
•
•
Anodized aluminum endplate supported by linear bearing on rods.
End plate allows for part lengths of 1” to 30”
Plate held in place by quick clamp
9
Download Web presentation
Web presentation.pdf (PDF, 1.25 MB)
Download PDF
Share this file on social networks
Link to this page
Permanent link
Use the permanent link to the download page to share your document on Facebook, Twitter, LinkedIn, or directly with a contact by e-Mail, Messenger, Whatsapp, Line..
Short link
Use the short link to share your document on Twitter or by text message (SMS)
HTML Code
Copy the following HTML code to share your document on a Website or Blog
QR Code to this page
This file has been shared publicly by a user of PDF Archive.
Document ID: 0000494370.