Formulario [Mignano A] (PDF)
File information
Author: Antonio Mignano
This PDF 1.5 document has been generated by Acrobat PDFMaker 11 per Word / Adobe PDF Library 11.0, and has been sent on pdf-archive.com on 21/06/2017 at 19:04, from IP address 2.225.x.x.
The current document download page has been viewed 230 times.
File size: 306.88 KB (3 pages).
Privacy: public file

File preview
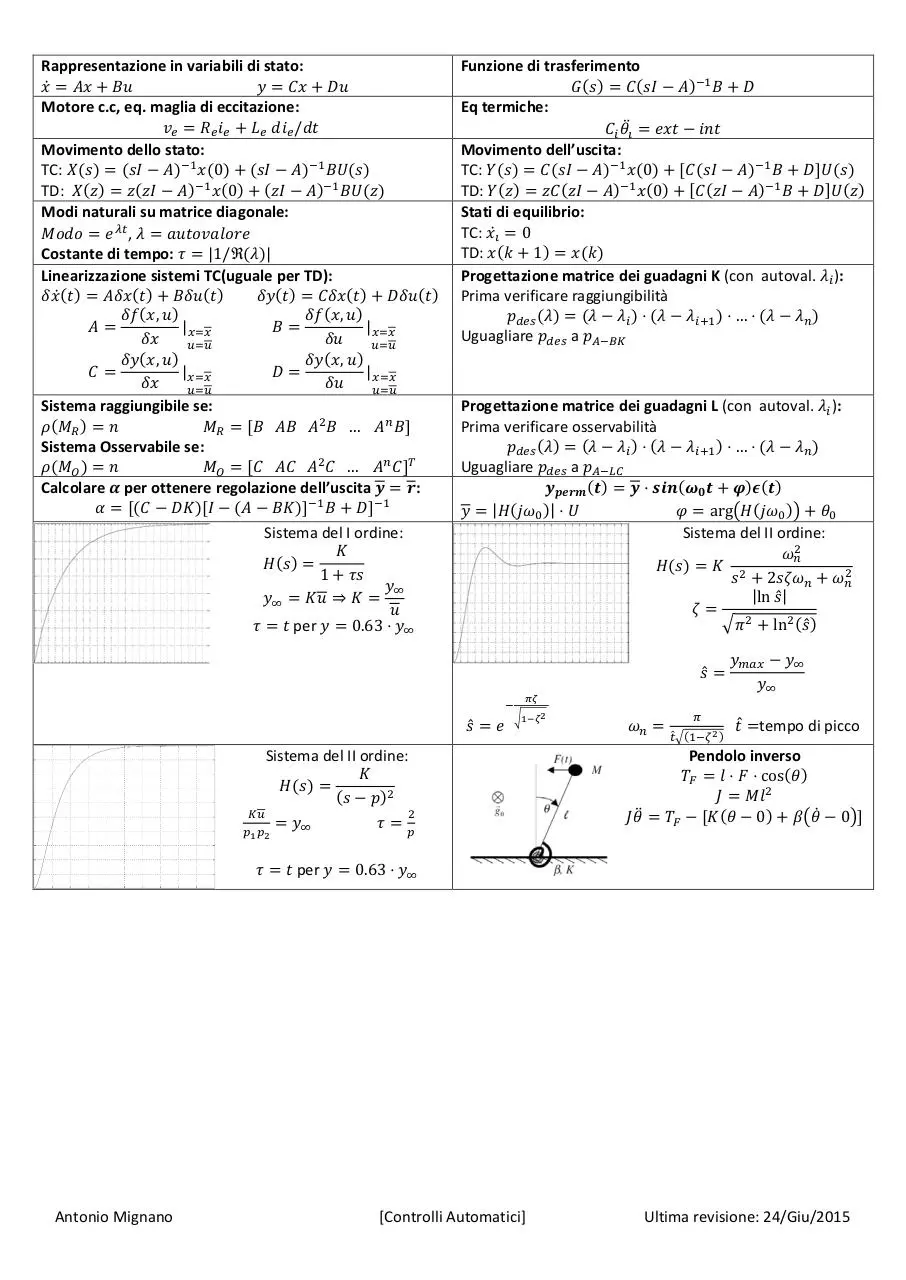
Rappresentazione in variabili di stato:
𝑥𝑥̇ = 𝐴𝐴𝐴𝐴 + 𝐵𝐵𝐵𝐵
𝑦𝑦 = 𝐶𝐶𝐶𝐶 + 𝐷𝐷𝐷𝐷
Motore c.c, eq. maglia di eccitazione:
𝑣𝑣𝑒𝑒 = 𝑅𝑅𝑒𝑒 𝑖𝑖𝑒𝑒 + 𝐿𝐿𝑒𝑒 𝑑𝑑𝑖𝑖𝑒𝑒 /𝑑𝑑𝑑𝑑
Movimento dello stato:
TC: 𝑋𝑋(𝑠𝑠) = (𝑠𝑠𝑠𝑠 − 𝐴𝐴)−1 𝑥𝑥(0) + (𝑠𝑠𝑠𝑠 − 𝐴𝐴)−1 𝐵𝐵𝐵𝐵(𝑠𝑠)
TD: 𝑋𝑋(𝑧𝑧) = 𝑧𝑧(𝑧𝑧𝑧𝑧 − 𝐴𝐴)−1 𝑥𝑥(0) + (𝑧𝑧𝑧𝑧 − 𝐴𝐴)−1 𝐵𝐵𝐵𝐵(𝑧𝑧)
Modi naturali su matrice diagonale:
𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀 = 𝑒𝑒 𝜆𝜆𝜆𝜆 , 𝜆𝜆 = 𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎
Costante di tempo: 𝜏𝜏 = |1/ℜ(𝜆𝜆)|
Linearizzazione sistemi TC(uguale per TD):
𝛿𝛿𝑥𝑥̇ (𝑡𝑡) = 𝐴𝐴𝐴𝐴𝐴𝐴(𝑡𝑡) + 𝐵𝐵𝐵𝐵𝐵𝐵(𝑡𝑡)
𝛿𝛿𝛿𝛿(𝑡𝑡) = 𝐶𝐶𝐶𝐶𝐶𝐶(𝑡𝑡) + 𝐷𝐷𝐷𝐷𝐷𝐷(𝑡𝑡)
𝛿𝛿𝛿𝛿(𝑥𝑥, 𝑢𝑢)
𝛿𝛿𝛿𝛿(𝑥𝑥, 𝑢𝑢)
𝐴𝐴 =
| 𝑥𝑥=𝑥𝑥
𝐵𝐵 =
| 𝑥𝑥=𝑥𝑥
𝛿𝛿𝛿𝛿
𝛿𝛿𝛿𝛿
𝑢𝑢=𝑢𝑢
𝑢𝑢=𝑢𝑢
𝛿𝛿𝛿𝛿(𝑥𝑥, 𝑢𝑢)
𝛿𝛿𝛿𝛿(𝑥𝑥, 𝑢𝑢)
𝐶𝐶 =
| 𝑥𝑥=𝑥𝑥
𝐷𝐷 =
| 𝑥𝑥=𝑥𝑥
𝛿𝛿𝛿𝛿
𝛿𝛿𝛿𝛿
𝑢𝑢=𝑢𝑢
𝑢𝑢=𝑢𝑢
Sistema raggiungibile se:
𝜌𝜌(𝑀𝑀𝑅𝑅 ) = 𝑛𝑛
𝑀𝑀𝑅𝑅 = [𝐵𝐵 𝐴𝐴𝐴𝐴 𝐴𝐴2 𝐵𝐵 … 𝐴𝐴𝑛𝑛 𝐵𝐵]
Sistema Osservabile se:
𝜌𝜌(𝑀𝑀𝑂𝑂 ) = 𝑛𝑛
𝑀𝑀𝑂𝑂 = [𝐶𝐶 𝐴𝐴𝐴𝐴 𝐴𝐴2 𝐶𝐶 … 𝐴𝐴𝑛𝑛 𝐶𝐶 ]𝑇𝑇
Calcolare 𝜶𝜶 per ottenere regolazione dell’uscita 𝒚𝒚 = 𝒓𝒓:
𝛼𝛼 = [(𝐶𝐶 − 𝐷𝐷𝐷𝐷)[𝐼𝐼 − (𝐴𝐴 − 𝐵𝐵𝐵𝐵)]−1 𝐵𝐵 + 𝐷𝐷]−1
Sistema del I ordine:
𝐾𝐾
𝐻𝐻(𝑠𝑠) =
1 + 𝜏𝜏𝜏𝜏
𝑦𝑦∞
𝑦𝑦∞ = 𝐾𝐾𝑢𝑢 ⇒ 𝐾𝐾 =
𝑢𝑢
𝜏𝜏 = 𝑡𝑡 per 𝑦𝑦 = 0.63 ⋅ 𝑦𝑦∞
𝐾𝐾𝑢𝑢
Sistema del II ordine:
𝐾𝐾
𝐻𝐻(𝑠𝑠) =
(𝑠𝑠 − 𝑝𝑝)2
𝑝𝑝1 𝑝𝑝2
= 𝑦𝑦∞
𝜏𝜏 =
Funzione di trasferimento
𝐺𝐺(𝑠𝑠) = 𝐶𝐶(𝑠𝑠𝑠𝑠 − 𝐴𝐴)−1 𝐵𝐵 + 𝐷𝐷
Eq termiche:
𝐶𝐶𝑖𝑖 𝜃𝜃𝚤𝚤̈ = 𝑒𝑒𝑒𝑒𝑒𝑒 − 𝑖𝑖𝑖𝑖𝑖𝑖
Movimento dell’uscita:
TC: 𝑌𝑌(𝑠𝑠) = 𝐶𝐶(𝑠𝑠𝐼𝐼 − 𝐴𝐴)−1 𝑥𝑥(0) + [𝐶𝐶(𝑠𝑠𝑠𝑠 − 𝐴𝐴)−1 𝐵𝐵 + 𝐷𝐷]𝑈𝑈(𝑠𝑠)
TD: 𝑌𝑌(𝑧𝑧) = 𝑧𝑧𝐶𝐶(𝑧𝑧𝐼𝐼 − 𝐴𝐴)−1 𝑥𝑥(0) + [𝐶𝐶(𝑧𝑧𝑧𝑧 − 𝐴𝐴)−1 𝐵𝐵 + 𝐷𝐷]𝑈𝑈(𝑧𝑧)
Stati di equilibrio:
TC: 𝑥𝑥𝚤𝚤̇ = 0
TD: 𝑥𝑥(𝑘𝑘 + 1) = 𝑥𝑥(𝑘𝑘)
Progettazione matrice dei guadagni K (con autoval. 𝜆𝜆𝑖𝑖 ):
Prima verificare raggiungibilità
𝑝𝑝𝑑𝑑𝑑𝑑𝑑𝑑 (𝜆𝜆) = (𝜆𝜆 − 𝜆𝜆𝑖𝑖 ) ⋅ (𝜆𝜆 − 𝜆𝜆𝑖𝑖+1 ) ⋅ … ⋅ (𝜆𝜆 − 𝜆𝜆𝑛𝑛 )
Uguagliare 𝑝𝑝𝑑𝑑𝑑𝑑𝑑𝑑 a 𝑝𝑝𝐴𝐴−𝐵𝐵𝐵𝐵
Progettazione matrice dei guadagni L (con autoval. 𝜆𝜆𝑖𝑖 ):
Prima verificare osservabilità
𝑝𝑝𝑑𝑑𝑑𝑑𝑑𝑑 (𝜆𝜆) = (𝜆𝜆 − 𝜆𝜆𝑖𝑖 ) ⋅ (𝜆𝜆 − 𝜆𝜆𝑖𝑖+1 ) ⋅ … ⋅ (𝜆𝜆 − 𝜆𝜆𝑛𝑛 )
Uguagliare 𝑝𝑝𝑑𝑑𝑑𝑑𝑑𝑑 a 𝑝𝑝𝐴𝐴−𝐿𝐿𝐿𝐿
𝒚𝒚𝒑𝒑𝒑𝒑𝒑𝒑𝒑𝒑 (𝒕𝒕) = 𝒚𝒚 ⋅ 𝒔𝒔𝒔𝒔𝒔𝒔(𝝎𝝎𝟎𝟎 𝒕𝒕 + 𝝋𝝋)𝝐𝝐(𝒕𝒕)
𝑦𝑦 = |𝐻𝐻(𝑗𝑗𝜔𝜔0 )| ⋅ 𝑈𝑈
𝜑𝜑 = arg�𝐻𝐻(𝑗𝑗𝜔𝜔0 )� + 𝜃𝜃0
Sistema del II ordine:
𝜔𝜔𝑛𝑛2
𝐻𝐻(𝑠𝑠) = 𝐾𝐾 2
𝑠𝑠 + 2𝑠𝑠𝑠𝑠𝜔𝜔𝑛𝑛 + 𝜔𝜔𝑛𝑛2
|ln 𝑠𝑠̂ |
𝜁𝜁 =
�𝜋𝜋 2 + ln2 (𝑠𝑠̂ )
𝑠𝑠̂ = 𝑒𝑒
−
𝜋𝜋𝜋𝜋
�1−𝜁𝜁2
2
𝑝𝑝
𝜏𝜏 = 𝑡𝑡 per 𝑦𝑦 = 0.63 ⋅ 𝑦𝑦∞
Antonio Mignano
[Controlli Automatici]
𝜔𝜔𝑛𝑛 =
𝑠𝑠̂ =
𝜋𝜋
𝑡𝑡̂ �(1−𝜁𝜁 2 )
𝑦𝑦𝑚𝑚𝑚𝑚𝑚𝑚 − 𝑦𝑦∞
𝑦𝑦∞
𝑡𝑡̂ =tempo di picco
Pendolo inverso
𝑇𝑇𝐹𝐹 = 𝑙𝑙 ⋅ 𝐹𝐹 ⋅ cos(𝜃𝜃)
𝐽𝐽 = 𝑀𝑀𝑙𝑙 2
𝐽𝐽𝜃𝜃̈ = 𝑇𝑇𝐹𝐹 − [𝐾𝐾(𝜃𝜃 − 0) + 𝛽𝛽�𝜃𝜃̇ − 0�]
Ultima revisione: 24/Giu/2015
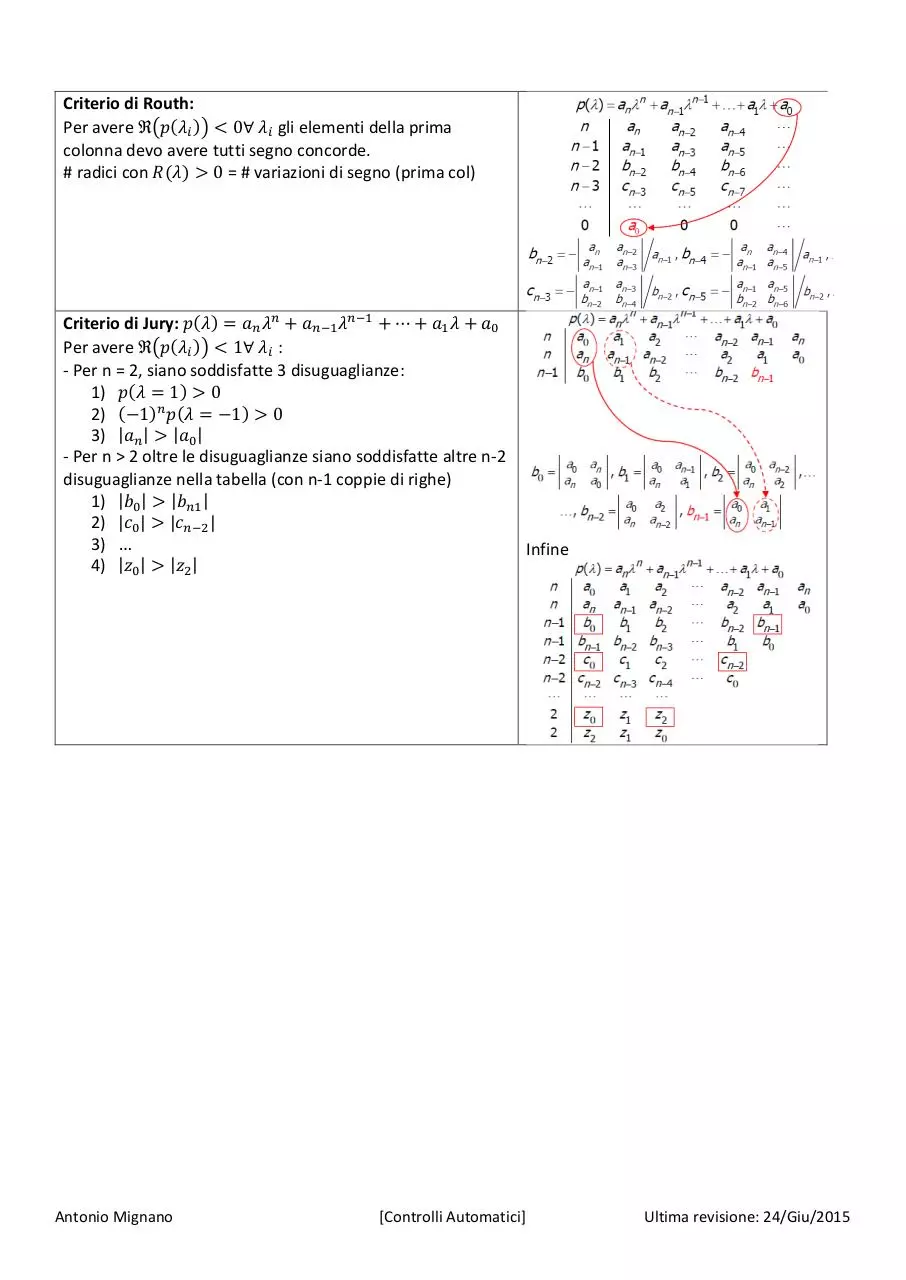
Criterio di Routh:
Per avere ℜ�𝑝𝑝(𝜆𝜆𝑖𝑖 )� < 0∀ 𝜆𝜆𝑖𝑖 gli elementi della prima
colonna devo avere tutti segno concorde.
# radici con 𝑅𝑅(𝜆𝜆) > 0 = # variazioni di segno (prima col)
Criterio di Jury: 𝑝𝑝(𝜆𝜆) = 𝑎𝑎𝑛𝑛 𝜆𝜆𝑛𝑛 + 𝑎𝑎𝑛𝑛−1 𝜆𝜆𝑛𝑛−1 + ⋯ + 𝑎𝑎1 𝜆𝜆 + 𝑎𝑎0
Per avere ℜ�𝑝𝑝(𝜆𝜆𝑖𝑖 )� < 1∀ 𝜆𝜆𝑖𝑖 :
- Per n = 2, siano soddisfatte 3 disuguaglianze:
1) 𝑝𝑝(𝜆𝜆 = 1) > 0
2) (−1)𝑛𝑛 𝑝𝑝(𝜆𝜆 = −1) > 0
3) |𝑎𝑎𝑛𝑛 | > |𝑎𝑎0 |
- Per n > 2 oltre le disuguaglianze siano soddisfatte altre n-2
disuguaglianze nella tabella (con n-1 coppie di righe)
1) |𝑏𝑏0 | > |𝑏𝑏𝑛𝑛1 |
2) |𝑐𝑐0 | > |𝑐𝑐𝑛𝑛−2 |
3) …
4) |𝑧𝑧0 | > |𝑧𝑧2 |
Antonio Mignano
[Controlli Automatici]
Infine
Ultima revisione: 24/Giu/2015
Rete anticipatrice o derivativa:
1+𝜏𝜏 𝑠𝑠
𝑅𝑅𝑑𝑑 (𝑠𝑠) = 𝜏𝜏𝑑𝑑𝑑𝑑
1+𝑚𝑚 𝑠𝑠
𝑑𝑑
Facendo riferimento al consueto schema di
controllo, si consideri in particolare:
𝑒𝑒(𝑠𝑠)
𝑟𝑟(𝑡𝑡) = sin(𝜔𝜔0 𝑡𝑡)
𝑊𝑊𝑒𝑒 (𝑠𝑠) =
=
𝑟𝑟(𝑠𝑠)
𝐾𝐾𝑟𝑟
1+𝐺𝐺𝑎𝑎 (𝑠𝑠)
L’errore di inseguimento in regime permanente è
pertanto dato da 𝑒𝑒𝑝𝑝 (𝑡𝑡) = 𝐸𝐸 ⋅ sin(𝜔𝜔0 𝑡𝑡 + 𝜑𝜑𝑒𝑒 ) con
𝐸𝐸 = |𝑊𝑊𝑒𝑒 (𝑗𝑗𝜔𝜔0 )| e 𝜑𝜑𝑒𝑒 = arg�𝑊𝑊𝑒𝑒 (𝑗𝑗𝜔𝜔0 )�. L’errore
massimo in modulo in regime permanente è E.
A seguito delle approssimazioni si possono estrarre
delle relazioni notevoli per 𝑾𝑾𝒓𝒓𝒓𝒓𝒓𝒓 :
• 𝜔𝜔𝐵𝐵 𝑡𝑡𝑠𝑠 ≅ 3 (banda passante⋅tempo di salita)
𝜔𝜔𝑐𝑐
•
≅ 0.63
•
•
•
𝜔𝜔𝐵𝐵
1 + 𝑠𝑠̂ /𝑀𝑀𝑟𝑟 ≅ 0.9
𝑚𝑚𝜑𝜑 𝑀𝑀𝑟𝑟 ≅ 60 (in gradi ⋅ 𝑢𝑢𝑛𝑛 )
�𝑚𝑚𝜑𝜑,𝑙𝑙𝑙𝑙𝑙𝑙 �
≅ 60° − 5�𝑀𝑀𝑟𝑟,𝑙𝑙𝑙𝑙𝑙𝑙 �𝑑𝑑𝑑𝑑
𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔𝑔
Nel metodo di Ziegler-Nichols in anello aperto, si
utilizza una fdt approssimata del I ordine con
𝐾𝐾
ritardo:
𝐹𝐹(𝑠𝑠) = 𝐹𝐹 ⋅ 𝑒𝑒 −𝜃𝜃𝐹𝐹 𝑠𝑠
1+𝜏𝜏𝐹𝐹 𝑠𝑠
Introduce un aumento (anticipo) di fase crescente
al crescere di 𝑚𝑚𝑑𝑑 dove 𝜏𝜏𝑑𝑑 = 𝑥𝑥𝑑𝑑 /𝜔𝜔𝑐𝑐,𝑑𝑑𝑑𝑑𝑑𝑑 dove 𝑥𝑥𝑑𝑑 è
l’ascissa sul diagramma.
Per disegnarmi il diagramma generalizzato di una
rete 𝑚𝑚𝑑𝑑 faccio bode((1+s)/(1+s/md))
Rete attenuatrice:
𝑅𝑅𝑖𝑖 (𝑠𝑠) =
𝜏𝜏
1+ 𝑖𝑖 𝑠𝑠
𝑚𝑚𝑖𝑖
1+𝜏𝜏𝑖𝑖 𝑠𝑠
Introduce un attenuazione di modulo crescente al
crescere di 𝑚𝑚𝑖𝑖 dove 𝜏𝜏𝑖𝑖 = 𝑥𝑥𝑖𝑖 /𝜔𝜔𝑐𝑐,𝑑𝑑𝑑𝑑𝑑𝑑 dove 𝑥𝑥𝑖𝑖 è
l’ascissa sul diagramma. L’aumento di 𝑥𝑥𝑖𝑖 fa
aumentare il tempo di assestamento.
Funzione di sensibilità: 𝑆𝑆(𝑠𝑠) =
PID: 𝑅𝑅𝑃𝑃𝑃𝑃𝑃𝑃 (𝑠𝑠) = 𝐾𝐾𝑝𝑝 +
𝑟𝑟 (𝑠𝑠)
= 𝐾𝐾𝑃𝑃 �1 +
𝑅𝑅𝑃𝑃𝑃𝑃𝑃𝑃
𝐾𝐾𝐼𝐼
1
𝑠𝑠
𝑇𝑇𝐼𝐼 𝑠𝑠
+ 𝐾𝐾𝐷𝐷 𝑠𝑠
+
P
PI
PID
Antonio Mignano
𝐾𝐾𝐹𝐹 𝜃𝜃𝐹𝐹
𝑻𝑻𝑰𝑰
oppure
𝑇𝑇𝐷𝐷 𝑠𝑠
𝑇𝑇 �
1+ 𝐷𝐷 𝑠𝑠
𝑁𝑁
con 𝑇𝑇𝐼𝐼 = 𝐾𝐾𝑃𝑃 /𝐾𝐾𝐼𝐼 tempo integrale e 𝑇𝑇𝐷𝐷 = 𝐾𝐾𝐷𝐷 /𝐾𝐾𝑃𝑃
tempo derivativo.
Prendendo come 𝐾𝐾𝑝𝑝 il margine di guadagno 𝑚𝑚𝐺𝐺
del sistema, e come 𝑇𝑇 il periodo dell’oscillazione
sull’uscita pari a 2𝜋𝜋/𝜔𝜔𝜋𝜋 possiamo ricavare
secondo: [Kp_bar,Pm,wpi,Wcp] = margin(F)
𝑲𝑲𝑷𝑷
𝑻𝑻𝑰𝑰
𝑻𝑻𝑫𝑫
P
0.5𝐾𝐾𝑃𝑃
PI
0.45 𝐾𝐾𝑃𝑃 0.8𝑇𝑇
PID
0.6𝐾𝐾𝑃𝑃 0.5𝑇𝑇 0.125𝑇𝑇
Discretizzazione controllore:
𝑇𝑇𝑐𝑐 =
2𝜋𝜋
20∗𝜔𝜔𝐵𝐵
Cz1 = c2d(C, Tc, 'zoh');
𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺ℎ =
Cz2 = c2d(C, Tc, 'tustin');
Per determinare 𝐾𝐾𝐹𝐹 , 𝜏𝜏𝑓𝑓 , 𝜃𝜃𝐹𝐹 si utilizza il metodo
della tangente (leggendo dallo step della funzione) Cz3 = c2d(C, Tc, 'matched');
Fz = c2d(F, Tc, 'zoh');
𝑦𝑦(𝜏𝜏𝐹𝐹 + 𝜃𝜃𝐹𝐹 ) = 0.63 𝑦𝑦∞
𝜃𝜃𝐹𝐹 = da dove comincia
il grafico (ritardo)
𝑲𝑲𝑷𝑷
𝜏𝜏𝐹𝐹
𝐾𝐾𝐹𝐹 𝜃𝜃𝐹𝐹
0.9𝜏𝜏𝐹𝐹
𝐾𝐾𝐹𝐹 𝜃𝜃𝐹𝐹
𝜏𝜏
1.2 𝐹𝐹
1
1+𝐺𝐺𝑎𝑎 (𝑠𝑠)
𝐺𝐺𝐺𝐺
𝑇𝑇
1+𝑠𝑠⋅ 2𝐶𝐶
𝑻𝑻𝑫𝑫
3𝜃𝜃𝐹𝐹
2𝜃𝜃𝐹𝐹 0.5𝜃𝜃𝐹𝐹
[Controlli Automatici]
Ultima revisione: 24/Giu/2015
Download Formulario [Mignano A]
Formulario [Mignano A].pdf (PDF, 306.88 KB)
Download PDF
Share this file on social networks
Link to this page
Permanent link
Use the permanent link to the download page to share your document on Facebook, Twitter, LinkedIn, or directly with a contact by e-Mail, Messenger, Whatsapp, Line..
Short link
Use the short link to share your document on Twitter or by text message (SMS)
HTML Code
Copy the following HTML code to share your document on a Website or Blog
QR Code to this page
![QR Code link to PDF file Formulario [Mignano A].pdf](/qr/W/W5/W5r2zo85.png)
This file has been shared publicly by a user of PDF Archive.
Document ID: 0000615684.